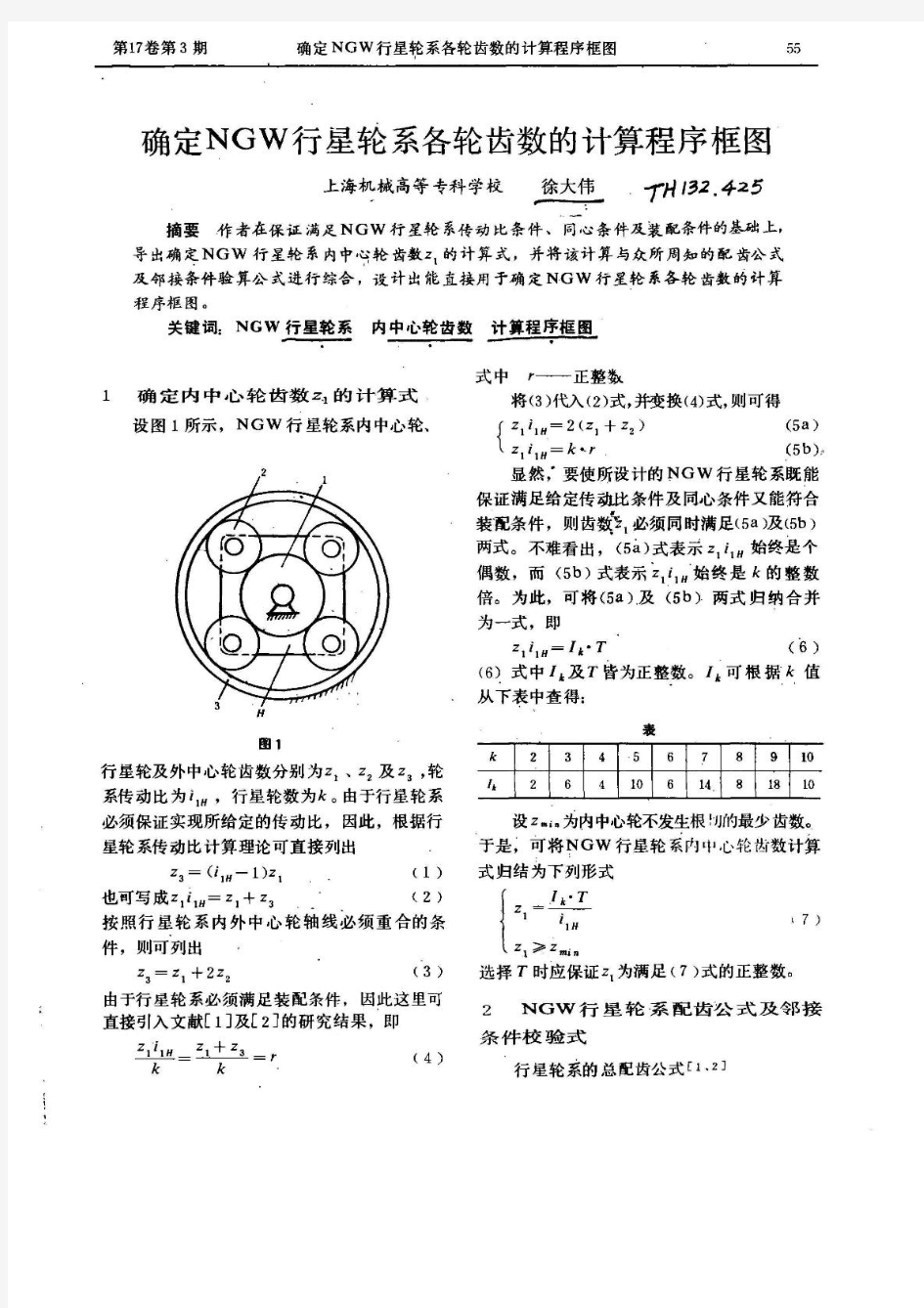
确定NGW行星轮系各轮齿数的计算程序框图

齿轮传动计算题(带答案)
第四章齿轮传动计算题专项训练(答案);1、已知一标准直齿圆柱齿轮的齿数z=36,顶圆d;2、已知一标准直齿圆柱齿轮副,其传动比i=3,主;3、有一对标准直齿圆柱齿轮,m=2mm,α=20;4、某传动装置中有一对渐开线;5、已知一对正确安装的标准渐开线正常齿轮的ɑ=2;解:144=4/2(Z1+iZ1)Z1=18Z2;d 1=4*18=72d2=4*54=216 第四章齿轮传动计算题专项训练(答案) 1、已知一标准直齿圆柱齿轮的齿数z=36,顶圆da=304mm。试计算其分度圆直径d、根圆直径df、齿距p以及齿高h。 2、已知一标准直齿圆柱齿轮副,其传动比i=3,主动齿轮转速n1=750r/mi n,中心距a=240mm,模数m=5mm。试求从动轮转速n2,以及两齿轮齿数z1和z 2。 3、有一对标准直齿圆柱齿轮,m=2mm,α=200, Z1=25,Z2=50,求(1)如果n1=960r/min,n2=?(2)中心距a=?(3)齿距p=?答案: n2=480 a=7 5 p=6.28 4、某传动装置中有一对渐开线。标准直齿圆柱齿轮(正常齿),大齿轮已损坏,小齿轮的齿数z1=24,齿顶圆直径da1=78mm, 中心距a=135mm, 试计算大齿轮的主要几何尺寸及这对齿轮的传动比。解: 78=m(24+2) m=3 a=m/2(z1 +z2) 135=3/2(24+z2) z2 =66 da2=3*66+2*3=204 df2=3*66-2*1.25*3=190.5 i =66/24=2.75 5、已知一对正确安装的标准渐开线正常齿轮的ɑ=200,m=4mm,传动比i12 =3,中心距a=144mm。试求两齿轮的齿数、分度圆半径、齿顶圆半径、齿根圆半径。
最新机械基础轮系练习题
XXXXX学校《机械基础》练习题 一、填空题 1.由一系列相互啮合齿轮所构成的传动系统称为_________. 2.按照轮系传动时各齿轮的轴线位置是否固定,轮系分为________和________两大类. 3.当轮系运转时,所有齿轮几何轴线的位置相对于机架固定不变的轮系称为_______. 4.轮系中,既有定轴轮系又有行星轮系的称为________. 5.采用行星轮系,可以将两个独立的运动_______为一个运动,或将一个运动_______为两个独立的运动.6.轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用_________的方法表示. 7.定轴轮系中的传动比等于_________的转速之比,也等于该轮系中________与_______之比. 8.在各齿轮轴线相互平行的轮系中,若齿轮的外啮合对数是偶数,则首轮与末轮的转向_______;若为奇数,则首轮与末轮的转向__________. 9.在轮系中,惰轮常用于传动距离稍__________和需要改变________的场合. 10.在轮系中,末端件若是齿轮齿条,它可以把主动件的________运动变为齿条的______运动. 11.轮系的特点:(1)可获得_________的传动比;(2)可实现__________距离传动;(3)可实现________、________要求;(4)可_________或__________运动. 12.平面定轴轮系中传动比计算公式为_________,其中(-1)的n次方,n表示 ________.若(-1) 的n次方为正,则首、末两轮转向____. 13.定釉轮系中任一从动件的转速计算公式为______________________. 14.定轴轮系末端通常有下列三种传动形式,则末端件的移动速度v(或移动距离L)的计算公式分别为: (1)末端为螺旋传动时:________________ (2)末端为滚动轮传动时:______________ (3)末端为齿轮齿条传动时:_____________ 二、单选题 1.若齿轮与轴之间( ),则齿轮与轴各自转动,互不影响. A.空套 B.固定 c.滑移 D.空间配合 2.如图所示的轮系中,设已知Z1= Z2=Z3′=Z4= 20,Z3=Z5= 60,又齿轮1、3、3′与5同轴线,试求传动比i15。( ) A.3 B.6 C.9 D. 12 3.汽车后桥传动轴部分组成的轮系为( ) A.平面定轴轮系 B.空间定轴轮系 c.周转轮系 D.都有可能 4.定轴轮系传动比大小与轮系中惰轮的齿数 ( ) A.无关 B.有关,成正比 C.有关,成反比D.有关,不成比例 5.若主动轴转速为1 200 r/min,若要求从动轴获得12 r/min的转速,应采用( )传动. A. -对直齿圆柱齿轮 B.链 c.轮系 D.蜗轮蜗杆6.关于轮系的说法,正确的是 ( ) A.所有机械传动方式中,轮系的传动比最大 B.轮系靠惰轮变速,靠离合器变向 C.周转轮系只能实现运动的合成与分解 D.轮系的传动比,是构成该轮系所有机械传动方式传动叱的连乘积 7.在轮系中,两齿轮间若增加( )个惰轮时,首、末两轮的转向相同. A.奇数 B.偶数 c.任意数 D.以上都可以 8.轮系的末端是螺旋传动,已知末端轴转速行n=80 r/min,三线螺杆的螺距为4 mm,则螺母每分钟移动距离为( )mm. A. 240 B.320 C.960 D. 160 9.轮系的末端是齿轮齿条传动,已知小齿轮的模数,m=3 mm,齿数z=25,末轴转速n=75r/mln,则齿条每分钟移动的距离为( )mm. A.17662.5 B.5625 C.5887.5 D.8331 10.如图所示轮系,Ⅳ轴可得到几种转速( ) A.3种 B.6种 C.9种 D.12种 三、计算题 1.如图所示为多刀半自动车床主轴箱传动系统.已知带轮直径D1=D2-=180 mm,z1=45,z2=72,z3=36,z4 =81,z5 =59,z6 =54,z7=25,z8=88.试求当电动机转速n=1443 r/min时,主轴Ⅲ的各级转速.
齿轮模数选取及标准
渐开线齿轮有五个基本参数,它们分别是: 名称符号意义标准化数值 齿数(teeth number)? Z 在齿轮整个圆周上轮齿的总数称为齿数 模数(module)m 齿距分度圆齿距p与π的比值模数及齿轮的承载能力。 压力角(特指分度圆压力角)(pressure angle)决定渐开线齿形和齿轮啮合性能的重 要参数 我国规定标准化压力角为20 度 齿顶高系数 齿顶高计算系数:我国规定标准化齿顶高系数为1 顶隙系数顶隙(clearance)计算系数我国规定标准化顶隙系数为标准齿轮:模数、压力角、齿顶高系数、顶隙系数为标准值,且分度圆上的齿厚等于齿槽宽的渐开线齿轮。 我国规定的标准模数系列表 第一系列 1234568 10121620253240 50 第二系 列78(11)14182228(30)3645注:选用模数时,应优先采用第一系列,其次是第二系列,括号内的模数尽可能不用. 系列?(1)渐开线圆柱齿轮模数(GB/T 1357-1987) 第一系列? 1 2 3 4 5 6 8 10 12 16 20 25 32 40 50 第二系列? ()()()7 9 (11)14 18 22 28 (30)36 45
?(2)锥齿轮模数(GB/T 12368-1990) 1 2 3 4 5 6 7 8 9 10 11 12 14 16 18 20 22 25 28 30 32 36 40 45 50 注: 1.对于渐开线圆柱斜齿轮是指法向模数。 2.优先选用第一系列,括号内的模数尽可能不用。 3.模数代号是m,单位是mm 名称含有蜗轮的标准 SH/T 0094-91 (1998年确认)蜗轮蜗杆油 94KB SJ 1824-81 小模数蜗轮蜗杆优选结构尺寸 206KB JB/T 8809-1998 SWL 蜗轮螺杆升降机型式、参数与尺寸 520KB JB/T 高精度蜗轮滚齿机技术条件 206KB JB/T 高精度蜗轮滚齿机精度 261KB 名称含有蜗杆的标准 SH/T 0094-91 (1998年确认)蜗轮蜗杆油 94KB QC/T 620-1999 A型蜗杆传动式软管夹子 347KB QC/T 619-1999 B型和C型蜗杆传动式软管夹子 83KB GB/T 19935-2005蜗杆传动蜗杆的几何参数-蜗杆装置的铭牌、中心距、用户提供给制造者的参数 121KB SJ 1824-81 小模数蜗轮蜗杆优选结构尺寸 206KB JB/T 蜗杆磨床技术条件 160KB JB/T 蜗杆磨床精度检验 244KB JB/T 9051-1999 平面包络环面蜗杆减速器 922KB JB/T 8373-1996 普通磨具蜗杆砂轮 250KB JB/T 7936-1999 直廓环面蜗杆减速器 731KB JB/T 7935-1999 圆弧圆柱蜗杆减速器 467KB JB/T 7848-1995 立式圆弧圆柱蜗杆减速器 175KB JB/T 7847-1995 立式锥面包铬圆柱蜗杆减速器 203KB JB/T 7008-1993 ZC1型双级蜗杆及齿轮蜗杆减速器 548KB JB/T 6387-1992 轴装式圆弧圆柱蜗杆减速器 679KB JB/T 5559-1991 锥面包络圆柱蜗杆减速器 524KB JB/T 5558-1991 蜗杆减速器加载试验方法 96KB JB/T 53662-1999 圆弧圆柱蜗杆减速器产品质量分等 274KB JB/T 3993-1999 蜗杆砂轮磨齿机精度检验 287KB JB/T 10008-1999 测量蜗杆 267KB HG/T 釜用立式减速机 CW系列圆柱齿轮、圆弧圆柱蜗杆减速机 646KB HG/T 2738-1995 轮胎定型硫化机用平面二次包络环面蜗杆减速机系列与基本参数 182KB
机械轮系计算题.docx
福建专升本复习资料(二) 轮系计算 1. z z z试求在同一时间内当构件 1和 3 的转数分别为 n n设 2. 在图示的轮系中,设 1= 2=30,3=90,1=1, 3=-1(逆时针为正 )时, nH 及 i1H 的值。 3.图示为一电动卷扬机的减速器运动简图,已知各轮齿数 ,试求 : 传动比 i15。 4.在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:Z1=30, Z2=Z2’ =35,Z3=90, Z4=60,求传动比i14。 5.在图示轮系中,已知:Z1=22,Z 3=88,Z 3’=Z 5,试求传动比 i15。
6.图示为双螺旋桨飞机的减速器中,已知:Za=26,Z b=66,Zg=20,Za’=30,Zg’= 18,Zb’=66,若na=15000rpm时,求 np 及 nQ 的大小及转向。 7.图示为一种大速比减速器的示意图 , 动力由齿轮 1 处输入 , H 处输出 .已知各轮齿数为 :Z1=12, Z2=48, Z3=72, Z2’ =48,Z3’ =96,Z4=12, 试求传动比 i1H 。 8.如图所示轮系机构中,已知:Z 2=Z 5=30,Z 2’= 22.各齿轮模数均相同,试求传动比 i54。 9.图示为用于自动化照明灯具上的轮系,已知输入轴转速 n1=19.5rpm, 各轮的齿数分别为:Z1=60,Z2=Z 2’=30,Z 3=Z 4=40,Z 5=120,试求箱体的转速? 10. 图示的轮系中,已知各轮齿数为Z1=60,Z 2=20,Z 2’=20,Z 3=Z 4= 20,Z 5=100,试求
传动比 i41? 11. 在图示的混合轮系中,已知Z 1=Z 5’=1,Z 3=99,Z 4’= 101,Z 2=Z 4=Z 5=Z 6=100,各轮的模数相同,压力角相等.求: 1、i16 2、若 w1 顺时针方向转动,那么 w 6的转向如何? 3、回归轮系, 3- 4- 4’ -5中,为满足同心条件,应采用哪种变位传动方案较好?为什么?若此回归 轮系既要满足同心条件,又要保证实现标准齿轮传动应采用什么方法? 4、若已知蜗杆 1,蜗轮 2 组成的传动中,它们的模数 m =2mm,蜗杆特性系数 q=13, 那么蜗杆、蜗轮传动 的中心距 a12=? 12. 图示轮系中蜗杆 1 为双头左旋蜗杆 Z 1=2,转向如图所示。蜗轮的齿数为 Z 2=50,蜗杆 2 为单头右 旋蜗杆 Z 2’ 蜗轮 3 的齿数为 3 =40, 其余各轮齿数为 3’44’55’6 =1, Z Z =30, Z =20, Z =26, Z =18, Z =46, Z =16, Z =22。求 i 。 7 17 13. 在图示传动系统中,件 1、 5 为蜗杆,件 2、 6 为蜗轮,件 3、4 为斜齿轮,件 7、 8 为锥齿轮。已知蜗杆 1 为主动,要求输出轮 8 的回转方向如图示。试确定: 1)各轴的回转方向(画在图上) ; 2)考虑Ⅰ、Ⅱ、Ⅲ轴上所受轴向力能抵消一部分, 定出各轮的螺旋线方向(画在图上) ; 3)画出各轮的轴向力的方向,并画出轮 4 所受的力。
最新行星齿轮传动比计算资料
行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T的机构
1 2 3 4 差动轮系:2个运动 行星轮系:, 对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 13 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W AH H A H H A H AB i W W W W W i -=-=--= 110H AB AH i i -=1
行星齿轮传动比最简计算方法公式法
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。 注: H ab i =±所有从动轮齿数的连乘积所有主动轮齿数的连乘积 ( 正负号不表示周转轮系中a 轮和b 轮的实际转向关系,而表示转化轮系中a 轮和b 轮的转向关系。转向相同取正,相反取负。 不能省略正负号,此处正负号关系着传动比的计算数值!)
图解齿轮的基本参数(精)
1, 齿数 z 一个齿轮的轮齿总数。 2, 模数 m 齿距与齿数的乘积等于分度圆的周长,即pz=πd, 式中 z 是自然数, π是无理数。为使 d 为有理数的条件是p/π为有理数,称之为模数。即:m=p/π 3, 分度圆直径 d 齿轮的轮齿尺寸均以此圆为基准而加以确定, d=mz 4,齿顶圆直径 da 和齿根圆直径 df 由齿顶高、齿根高计算公式可以推出齿顶圆直径和齿根圆直径的计算公式: da=d+2ha df=d-2hf =mz+2m=mz-2×1.25m =m(z+2=m(z-2.5 5, 模数 z:齿轮的分度圆是设计、计算齿轮各部分尺寸的基准 , 而齿轮分度圆的周长=πd=z p,于是得分度圆的直径 d=z p/π 由于在上式中π为一无理数 , 不便于作为基准的分度圆的定位 . 为了便于计算 , 制造和检验 , 现将比值p/π人为地规定为一些简单的数值 , 并把这个比值叫做模数(module,以 m 表示 , 即令 其单位为 mm. 于是得 :
模数 m 是决定齿轮尺寸的一个基本参数 . 齿数相同的齿轮模数大 , 则其尺寸也大 . 为了便于制造 , 检验和互换使用 , 齿轮的模数值已经标准化了 . 6,分度圆直径 d :在齿轮计算中必须规定一个圆作为尺寸计算的基准圆,定义:直径为模数乘以齿数的乘积的圆。实际在齿轮中并不存在, 只是一个定义上的圆。其直径和半径分别用 d 和 r 表示,值只和模数和齿数的乘积有关,模数为端面模数。与变位系数无关。标准齿轮中为槽宽和齿厚相等的那个圆 (不考虑齿侧间隙就为分度圆。标准齿轮传动中和节圆重合。但若是变位齿轮中, 分度圆上齿槽和齿厚将不再相等。若为变位齿轮传动中高变位齿轮传动分度圆仍和节圆重合。但角变位的齿轮传动将分度圆和节圆分离。 7,压力角α——在两齿轮节圆相切点 P 处,两齿廓曲线的公法线(即齿廓的受力方向与两节圆的公切线(即 P 点处的瞬时运动方向所夹的锐角称为压力角,也称啮合角。对单个齿轮即为齿形角。标准齿轮的压力角一般为20” 。 小压力角齿轮的承载能力较小; 而大压力角齿轮, 虽然承载能力较高, 但在传递转矩相同的情况下轴承的负荷增大,因此仅用于特殊情况。
第五章 轮系题5-1 图示轮系中,已知1轮
第五章 轮系 题5-1 图示轮系中,已知1轮 转向n 1如图示。各轮齿数为:Z 1=20, Z 2=40,Z 3= 15,Z 4=60,Z 5=Z 6= 18, Z 7=1(左旋蜗杆),Z 8 =40,Z 9 =20 。 若n 1 =1000 r/min ,齿轮9的模数 m =3 mm ,试求齿条10的速度v 10 及 其移动方向(可在图中用箭头标出)。 解题分析: 判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但 有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。 确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画箭头的方法确定。 解答: 1.确定齿条10的速度v 10 大小 ∵ 320118152040186040753186428118=??????=== z z z z z z z z n n i ∴ min /125.3min /3201000 18189r r i n n n === = s /mm .s /mm .n mz n d v v 82960125 320360609999910=???π=π=π= = 2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可 定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)
题5-2 图示轮系中,已知蜗杆1 Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。要求: (1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ; (2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。 解题分析: 判定轮系类型:因在轮系运转 时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。 确定传动比计算式:空间定轴 轮系的传动比大小仍可用教材(5-1) 式计算,但转向只能用画箭头的方法 确定。 解答: 1.确定蜗轮2、蜗轮3的轮齿 螺旋线方向:根据蜗杆传动正确啮 合条件21βγ= ,32βγ=' ,可确定蜗轮2为左旋,蜗轮3为右旋。 蜗轮2、3转向:根据 蜗轮蜗杆的相对运动关系,确定转向n 2、n 3如题解5-2 图所示。 2.传动比i 17: 7.2962826301218 182040506543217654327117=????????=== ''''z z z z z z z z z z z z n n i 3.7轮的转向:在题5 - 2 图上用画箭头的方法,可定出n 7 的方向朝上(即↑),因 7轮轴线与蜗杆1轴线平行,故也可说n 7与n 1转向相同。
机械设计——分析计算题(共88题)
机械原理自测题库——分析计算题(共88题) 1、试计算图示机构的自由度(若有复合铰链、局部自由度或虚约束,必须明确指出)。并判断该机构的运动是否确定(标有箭头的机构为原动件)。若其运动是确定的,要进行杆组分析,并显示出拆组过程,指出各级杆组的级别、数目以及机构的级别。 图 a) 图b) 题 1 图 2、计算图示机构自由度,并判定该机构是否具有确定的运动(标有箭头的构件为原动件)。 图 a) 图 b) 题 2 图
3、计算图示机构自由度,并确定应给原动件的数目。 图 a 图b 题 3 图 4、在图示机构中试分析计算该机构的自由度数,若有复合铰链、局部自由度或虚约束,则在图上明确指出。 图a 图b 题 4 图 5、计算图示机构的自由度,并作出它们仅含低副的替代机构。
图 a) 图 b) 题 5 图 6、试计算图示机构的自由度。(若有复合铰链、局部自由度或虚约束,必须明确指出。)并指出杆组的数目与级别以及机构级别。 G L 题 6 图 7、计算下列机构的自由度(有复合铰链、虚约束和局部自由度请指出) 图 a) 图 b) 题 7 图
8、图示的铰链四杆机构中,已知mm l AB 65=,mm l CD 90=,mm l AD 125=, s rad mm l BC /10,1251==ω,顺时针转动,试用瞬心法求: 1)当φ=15°时,点C 的速度V C ; 2)当φ=15°时,构件BC 上(即BC 线上或其延长线上)速度最小的一点E 的位置及其速度值。 题 8 图 9、在图示的凸轮机构中,已知凸轮1以等角速度ω1=10rad/s 转动。凸轮为一偏心圆,其半径R 1=25mm ,L AB =15mm ,L AD =50mm ,φ1=90°,试用瞬心法求机构2的角速度ω2。 题 9 图 10 、 在 图 示 机 构 中 , 已 知 长 度 L AB =L BC =20 mm ,L CD =40mm ,∠a=∠β=90°W 1=100(1/S),请用速度瞬心法求C 点的速度的大小和方向
行星齿轮传动比计算(完整资料).doc
【最新整理,下载后即可编辑】 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类
若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系:, H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==
对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1 =100,Z 2 =101,Z 2' =100, Z 3 =99。求:输入件H对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H行星架 给整个机构(-W H )绕OO轴转动 = B W AH H A H H A H AB i W W W W W i- = - = - - =1 1 H AB AH i i- =1 2 1 3 2 2 3 1 13 )1 ( ' ? ? ? - = - - = Z Z Z Z W W W W i H H H
机械原理题目---轮系
第六章 轮系及其设计 计算及分析题 1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。 2、图示轮系,已知各轮齿数Z 1=18, Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。 1 2 3 4 5 H | 3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同 — 4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否 和齿轮1相同 1 I 2 2’ 33’ 4 H
5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。 7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求: (1)轮系的传动比i 1H 。 (2)若n 1=1000r/min ,转臂H 的转速n H = | 1 2 2’ 3 4 5 [ 3’ 4 5 1 2 { H 1 2 3 2’ 3’ 4 H
8、已知图示轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。试 求轮3的转速n 3 的大小和转向。 @ 9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。 10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。 11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=。 1 2 3 H 4 5 n 1 1 2 3 H 2’ 3’ \ 45
行星齿轮传动比分析与计算
行星齿轮传动比分析与计算 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系: , 对于行量轮系: H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==0 3=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W
∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 ∵W 3=0 ∴ ∴ 若Z 1=99 行星轮系传动比是计算出来的,而不是判断出来的。 AH H A H H A H A B i W W W W W i -=-=--= 110H AB AH i i -=1213 223113)1(' ???-=--= Z Z Z Z W W W W i H H H H H H i Z Z Z Z W W W 13 213210' =--H H i Z Z Z Z W W 13 21321 1'=+- H H i i 13 1100100991011??- =10000 1001009910111 111=??- = = H H i i 1001-=H i
轮系及其传动比计算
第八章 轮系及其传动比计算 第四十八讲齿轮系及其分类 如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。根据轮系中各齿轮运动形式的不同,轮系分类如下: ? ? ? ? ? ?? ? ? ? ? ? ? ? = = ? ? ? 成 由几个周转轮系组合而 和周转轮系混合而成或 混合轮系:由定轴轮系 ) 行星轮系( ) 差动轮系( 周转轮系(轴有公转) 空间定轴轮系 平面定轴轮系 定轴轮系(轴线固定) 轮系 1 2 F F 图8—1 图8—2 图8—3 定轴轮系中所有齿轮的轴线全部固定,若所 有齿轮的轴线全部在同一平面或相互平行的平 面内,则称为平面定轴轮系,如图8—1所示, 若所有齿轮的轴线并不全部在同一平面或相互 平行的平面内,则称为空间定轴轮系;若轮系 中有一个或几个齿轮轴线的位置并不固定,而 是绕着其它齿轮的固定轴线回转,如图8—2,8 —3所示,则这种轮系称为周转轮系,其中绕着 固定轴线回转的这种齿轮称为中心轮(或太阳 轮),即绕自身轴线回转又绕着其它齿轮的固定 轴线回转的齿轮称为行星轮,支撑行星轮的构图8—4 件称为系杆(或转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图8—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图8—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图8—4所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。
齿轮的基本参数和计算定律
87一基本参数 表示;α齿顶圆:轮齿齿顶所对应的圆称为齿顶圆,其直径用d 齿根圆:齿轮的齿槽底部所对应的圆称为齿根圆,直径用df表示。 齿厚:任意直径dk的圆周上,轮齿两侧齿廓间的弧长称为该圆上的齿厚,用sk表示;齿槽宽:任意直径dk的圆周上,齿槽两侧齿廓间的弧长称为该圆上的齿槽宽,用ek表示; 齿距:相邻两齿同侧齿廓间的弧长称为该圆上的齿距,用表示。设z 为齿数,则根据齿距定义可,故。 齿轮不同直径的圆周上,比值不同,而且其中还包含无理数;π k也是不等的。α又由渐开线特性可知,在不同直径的圆周上,齿廓各点的压力角 分度圆:为了便于设计、制造及互换,我们把齿轮某一圆周上的比值规定为标准值(整数或较完整的有理数),并使该圆上的压力角也为标准值,这个圆称为分度圆,其直径以d表示。 表示,我国国家标准规定的标准压力角为20°α压力角:分度圆上的压力角简称为压力角,以
模数:分度圆上的齿距p对π的比值称为模数,用m表示,单位为mm,即。模数是齿轮的主要参数之一,齿轮的主要几何尺寸都与模数成正比,m越大,则p越大,轮齿就越大,轮齿的抗弯能力就越强,所以模数m又是轮齿抗弯能力的标志。 顶隙:顶隙c=c*m是指一对齿轮啮合时,一个齿轮的齿顶圆到另一个齿轮的齿根圆的径向距离。顶隙有利于润滑油的流动。 表示;α齿顶高:轮齿上介于齿顶圆和分度之间的部分称为齿顶,其径向高度称为齿顶高, 用 h 齿根高:轮齿上介于齿根圆和分度之间的部分称为齿根,其径向高度称为齿根高,用hf 表示 标准齿轮: 标准齿轮:分度圆上齿厚与齿槽宽相等,且齿顶高和齿根高为标准值的齿轮为标准齿轮。因此,对于标准齿轮有 模数和齿数是齿轮最主要的参数。 在齿数不变的情况下,模数越大则轮齿越大,抗折断的能力越强,当然齿轮轮坯也越大,空间尺寸越大; 模数不变的情况下,齿数越大则渐开线越平缓,齿顶圆齿厚、齿根圆齿厚相应地越厚;
标准齿轮模数齿数计算公式 (1)
标准齿轮模数齿数计算公式 找对应表太不现实了! 告诉你一简单的: 齿轮的直径计算方法: 齿顶圆直径=(齿数+2)*模数 分度圆直径=齿数*模数 齿根圆直径=齿顶圆直径-×模数) 比如:M4 32齿34* 齿顶圆直径=(32+2)*4=136mm 分度圆直径=32*4=128mm 齿根圆直径=*4=118mm 7M 12齿中心距D=(分度圆直径1+分度圆直径2)/2 就是 (12+2)*7=98mm 这种计算方法针对所有的模数齿轮(不包括变位齿轮)。 模数表示齿轮牙的大小。 齿轮模数=分度圆直径÷齿数 =齿轮外径÷(齿数-2) 齿轮模数是有国家标准的(GB1357-78) 模数标准系列(优先选用)1、、、2、、3、4、5、6、8、10、12、14、16、20、25、32、40、50 模数标准系列(可以选用),,,,,,7,9,14,18,22,28,36,45 模数标准系列(尽可能不用),,,11,30 上面数值以外为非标准齿轮,不要采用! 塑胶齿轮注塑后要不要入水除应力 精确测定斜齿轮螺旋角的新方法 Circular Pitch (CP)周节 齿轮分度圆直径d的大小可以用模数(m)、径节(DP)或周节(CP)与齿数(z)表示 径节P(DP)是指按齿轮分度圆直径(以英寸计算)每英寸上所占有的齿数而言 径节与模数有这样的关系: m=DP CP1/8模=DP8= (π)=模 1) 什么是「模数」? 模数表示轮齿的大小。 R模数是分度圆齿距与圆周率(π)之比,单位为毫米(mm)。 除模数外,表示轮齿大小的还有CP(周节:Circular pitch)与DP(径节:Diametral pitch)。【参考】齿距是相邻两齿上相当点间的分度圆弧长。 2) 什么是「分度圆直径」? 分度圆直径是齿轮的基准直径。 决定齿轮大小的两大要素是模数和齿数、 分度圆直径等于齿数与模数(端面)的乘积。 过去,分度圆直径被称为基准节径。最近,按ISO标准,统一称为分度圆直径。 3) 什么是「压力角」?
《机械设计基础》题库 计算 轮系 自由度
试题题型:计算题 一、计算图示机构的自由度,并判断机构是否具有确定的运动。 (如有复合铰链、虚约束、局部自由度须指出) A B C D E A B D C E A B C D E F G A B C D E F G H I A B C D E F A B C D O E
A B C D E F E A G O F B C D O A B C D E F G H K E A G O F B C D A B C D E F O A B C D E F G O H
A B C D A O B C D E F A B C D O A B C O D E B C A D E F G H I O A O C B H D G I F E
二、轮系的计算 1.在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30, 试求传动比i 1H ,并说明I、H轴的转向是否相同? 2.在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40, Z 5= 90,试求传动比I ⅠⅡ,并说明I、Ⅱ轴的转向是否相同? 3.在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 1 Ⅰ 2 2’ 3 3’ 4 H 1 2 2’ 3 4 5 3’ Ⅰ Ⅱ 4 1 2 3 H 1 2 3’ H 4
4.在图示轮系中,已知各轮齿数为Z 1= 55, Z 2=11,Z 3=77,Z 3’=49,Z 4=12,Z 5=73,试求传动比i 1H 。 5.在图示轮系中,已知各轮齿数为Z 1= Z 2= 30,Z 3= 40,Z 4=20,Z 5=18,Z 6=38,试求传动比i 1H 。 6.在图示轮系中,已知各轮齿数为Z 1= Z 2’= 20,Z 2=40,Z 3= 80,试求传动比i 1H 。 2 5 6 4 3 1 3 1 2’ H
行星齿轮机构传动比计算方法
行星齿轮机构传动比计算方法
Key words: epicyclic gear train; speed ratio; compute way. 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。 行星齿轮传动或称周转轮系。根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。为理解方便,本论文所讨论限于2K-H型周转轮系。 关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动 Fig 1 Epicyclic gear train 0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、H ω为行星架H 转速、3 ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即1 3 Z Z =α。 1 行星架固定法 机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。 如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为H ωωωω、、、321。我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。那么,此时行星架的转速为()0=-+=H H H H ωωω,相当于行星
标准齿轮模数齿数计算公式
齿轮的直径计算方法: 齿顶圆直径=(齿数+2)*模数 分度圆直径=齿数*模数 齿根圆直径=齿顶圆直径-(4.5×模数) 比如:M4 32齿34*3.5 齿顶圆直径=(32+2)*4=136 分度圆直径=32*4=128 齿根圆直径=136-4.5*4=118 7M 12齿 中心距(分度圆直径1+分度圆直径2)/2 就是(12+2)*7=98 这种计算方法针对所有的模数齿轮(不包括变位齿轮)。 模数表示齿轮牙的大小。 齿轮模数=分度圆直径÷齿数 =齿轮外径÷(齿数-2) 齿轮模数是有国家标准的(1357-78) 模数标准系列(优先选用)1、1.25、1.5、2、2.5、3、4、5、6、8、10、12、14、16、20、25、32、40、50 模数标准系列(可以选用)1.75,2.25,2.75,3.5,4.5,5.5,7,9,14,18,22,28,36,45 模数标准系列(尽可能不用)3.25,3.75,6.5,11,30
上面数值以外为非标准齿轮,不要采用! 塑胶齿轮注塑后要不要入水除应力 精确测定斜齿轮螺旋角的新方法 ()周节 齿轮分度圆直径d的大小可以用模数(m)、径节()或周节()与齿数(z)表示 径节P()是指按齿轮分度圆直径(以英寸计算)每英寸上所占有的齿数而言
径节与模数有这样的关系: 25.4 1/8模=25.48=3.175 3.175/3.1416(π)=1.0106模 1) 什么是「模数」? 模数表示轮齿的大小。 R模数是分度圆齿距与圆周率(π)之比,单位为毫米()。 除模数外,表示轮齿大小的还有CP(周节:)与DP(径节:)。【参考】齿距是相邻两齿上相当点间的分度圆弧长。 2) 什么是「分度圆直径」? 分度圆直径是齿轮的基准直径。 决定齿轮大小的两大要素是模数和齿数、 分度圆直径等于齿数与模数(端面)的乘积。 过去,分度圆直径被称为基准节径。最近,按标准,统一称为分度圆直径。 3) 什么是「压力角」? 齿形与分度圆交点的径向线与该点的齿形切线所夹的锐角被称为分度圆压力角。一般所说的压力角,都是指分度圆压力角。 最为普遍地使用的压力角为20°,但是,也有使用14.5°、15°、17.5°、22.5°压力角的齿轮。 4) 单头与双头蜗杆的不同是什么? 蜗杆的螺旋齿数被称为「头数」,相当于齿轮的轮齿数。