《机械设计基础》(机电类第二版)部分习题答案
机械设计基础(第二版) 部分习题参考答案
第2章
2-1 答:两构件之间直接接触并能产生一定相对运动的连接称为运动副。平面高副是以点火线相接触,其接触部分的压强较高,易磨损。平面低副是面接触,受载时压强较低,磨损较轻,也便于润滑。
2-2 答:机构具有确定运动的条件是:机构中的原动件数等于机构的自由度数。 2-3 答:计算机构的自由度时要注意处理好三个关键问题,即复合铰链、局部自由度、虚约束。 2-4 答:虚约束是指机构中与其它约束重复而对机构运动不起新的限制作用的约束。而局部自由度是指机构中某些构件的局部运动不影响其它构件的运动,对整个机构的自由度不产生影响,这种局面运动的自由度称为局部自由度。
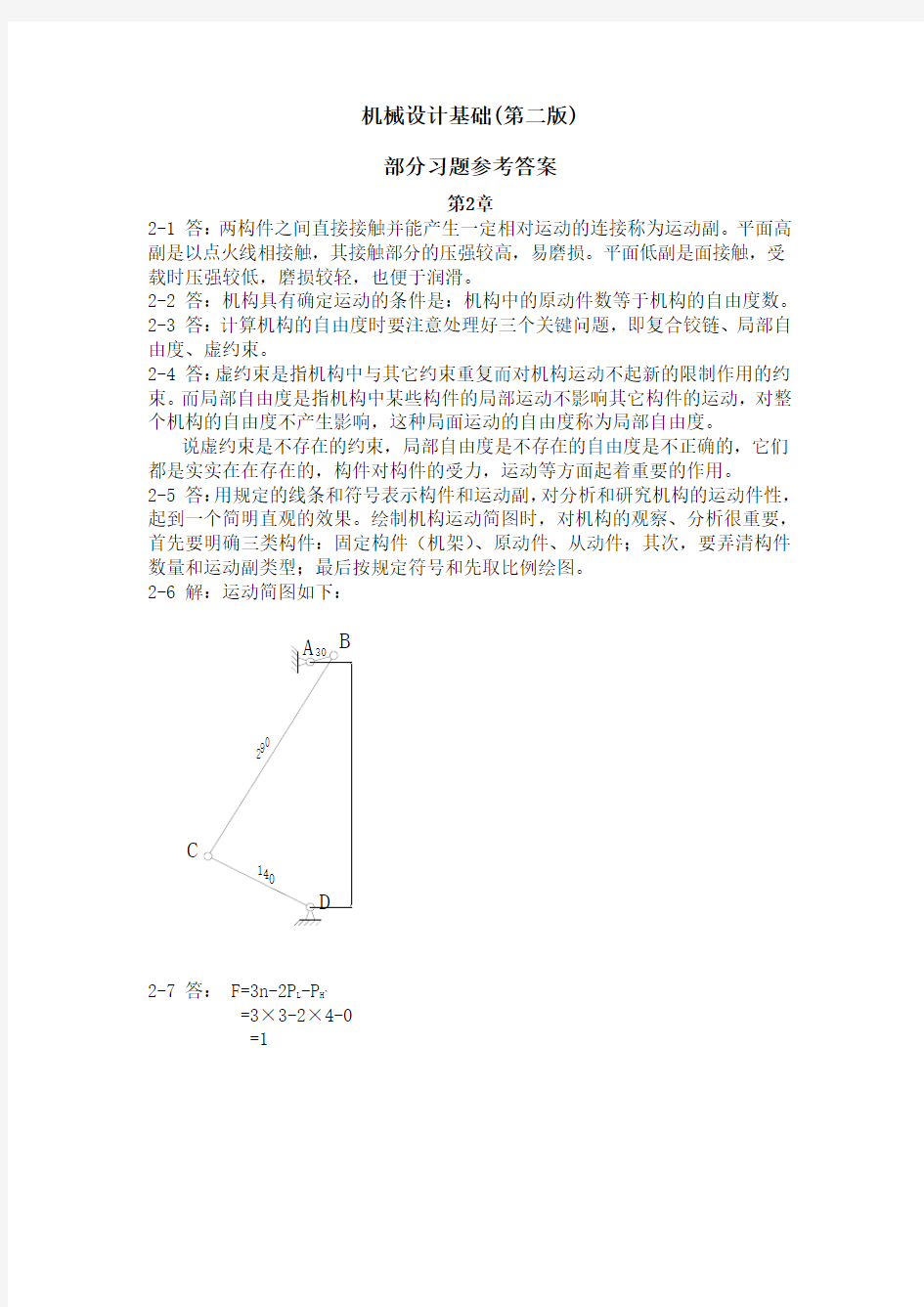
说虚约束是不存在的约束,局部自由度是不存在的自由度是不正确的,它们都是实实在在存在的,构件对构件的受力,运动等方面起着重要的作用。 2-5 答:用规定的线条和符号表示构件和运动副,对分析和研究机构的运动件性,起到一个简明直观的效果。绘制机构运动简图时,对机构的观察、分析很重要,首先要明确三类构件:固定构件(机架)、原动件、从动件;其次,要弄清构件数量和运动副类型;最后按规定符号和先取比例绘图。 2-6 解:运动简图如下:
2-7 答: F=3n-2P L -P H`
=3×3-2×4-0
=1
C
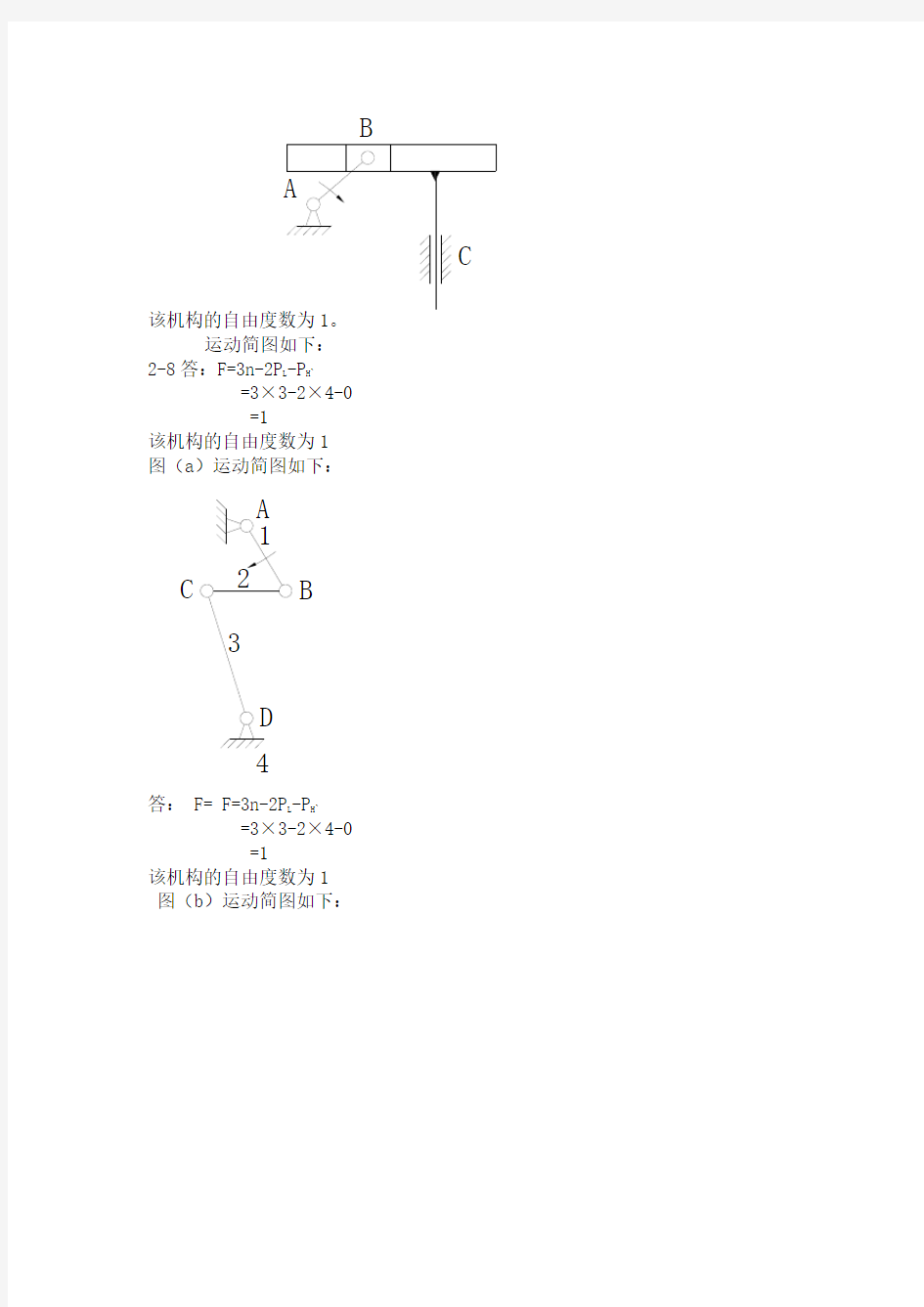
运动简图如下:
2-8答:F=3n-2P
L -P
H`
=3×3-2×4-0
=1 该机构的自由度数为1
图(a)运动简图如下:
B
C
答: F= F=3n-2P
L -P
H`
=3×3-2×4-0
=1 该机构的自由度数为1
图(b)运动简图如下:
B 2-9 答:
(a)n=9 P
L =13 P
H
=0
F=3n-2P
L -P
H`
=3×9-2×13-0 =1
该机构需要一个原动件。
(b)n=3 P
L =3 P
H
=2
F=3n-2P
L -P
H`
=3×3-2×3-2
=1
该机构需要一个原动件。机构中有两个高副,一个局部自由度。
(c)n=5 P
l =7 P
h
=0
F=3n-2P
L -P
H`
=3×5-2×7-0
=1
该机构需要一个原动件。
2-10 答:机构中常出现虚约束,是能够改善机构的刚性或受力状况,保证机构的顺利运动。
为使虚约束不成为有效约束,必须在满足一定的几何条件下设置虚约束,如同轴、平行、轨迹重合、对称等。在制造和安装过程中,要保证构件具有足够的制造和安装精度。
2-11 解:(a)n=5 P
L =7 P
H
=1
F=3n-2P
L -P
H`
=3×5-2×7-1
=0
机构的自由度数等于0,说明机构不能运动,机构设计不合理。改进方案如下图:
A
E
3
4
B
C
D
F H
G
F=3n-2P
L -P
H`
=3×6-2×8-1
=1
改进后机构的自由度数等于原动件数,说明机构具有确定的运动。这主要是将E点处改进为摆动导杆结构,使运动成为可能。
(b)n=5 P
L =7 P
H
=1
F=3n-2P
L -P
H`
=3×5-2×7-1
=0
机构的自由度数等于0,说明机构不能运动,主要原因是D点的轨迹为弧线,而被带动的构件与受到的约束是走直线。改进方案如下图:
F=3n-2P
L -P
H`
=3×6-2×8-1
=1
机构的自由度数等于原动件数,说明机构改进方案合理。
2-12 (a)解:n=7 P
L =10 P
H
=0
F=3n-2P
L -P
H`
=3×7-2×10-0
=1
机构原动件数等于自由度数,机构运动确定。本题注意C点为复合铰链。
(b)解:n=4 P
L =4 P
H
=2
F=3n-2P
L -P
H`
=3×4-2×4-2
=2
机构元件数等于自由度数,机构运动确定本题注意凸轮处为一个高副,小 滚子处为局部自由度高副。
第3章
3-1 答:平面四杆机构的基本形式有:(1)曲柄摇杆机构,(2)双曲柄机构,(3)双摇杆机构。
3-2 答:可利用曲柄滑块机构。 3-3 解:(1)AD+DC 和,并以最短杆为机架,故为双曲柄机构。 (2)BC +CD>AD+AB 此时最短杆与最长杆长度之和大于其余两杆长度 之和,故为双摇杆机构 (3)CD+BC=AD+AB 此时最短杆与最长杆长度之和等于其余两杆长度之和,并以最短杆的对杆为机架,故为双摇杆机构 3-4 答:曲柄摇杆机构中,当曲柄等速转动时,摇杆返回摆动时的平均速度大于工作行程的平均速度,此现象即为急回特性。 3-5 答:曲柄滑块机构中,以滑块为主动件,当曲柄与连杆两次共线位置时, 通过连杆传递给曲柄的压力角为90°,传动角为0°,即为死点。 克服死点位置的方法可采用飞轮,利用飞轮的惯性通过死点。 3-6. 解:(1)如图,摇杆摆角为:ψ=73.95° (2) 行程速比系数:05.166 .418066 .4180180180=-+=-+=θθ K (3)最小传动角 41.41min =γ C 2 3-7解:(1)如图,滑块的行程为:s=311.7mm (2) 行程速比系数:16.11 .131801 .131********=-+=-+=θθ K (3)最小传动角 32.51min =γ满足要求 3-8 解:(1)AD+BC (2) 因此机构曲柄滑块机构为对心曲柄滑块机构,极位夹角θ=0,此时K =1。 3-9解:连接21B B ,作此连线的中垂线,相交yy 轴即为A 点, 连接21C C ,作此连线的中垂线,相交yy 轴即为D 点, 第4章 4-1 答:行程是指从动件移动的最大位移h 。从动件由最低位置点升至最高位 置点的过程中,对应的凸轮转角称为推程运动角。从动件由最高位置点降至最低位置点的过程中,对应的凸轮转角称为回程运动角。从动件处于静止不动时,对应的凸轮转角称为休止角。 4-2 答:从动件在某瞬时由于速度的突变,加速度和惯性力在理论上均趋于无穷大时引起的冲击,称为刚性冲击。从动件在某瞬时加速度发生有限值的突变所引起的冲击,称为柔性冲击。两种冲击对凸轮机构的强度、磨损都有较大的影响。4-3 答:从动件的常用运动规律有:等速运动规律,等加速等减速运动规律,简谐运动规律。等速运动规律在运动的起点和终点会产生刚性冲击,因此只适用于低速轻载的凸轮机构。等加速等减速运动规律在运动的起点,中间点和终点会产生柔性冲击,因此适用于中速的凸轮机构。简谐运动规律在运动的起点和终点会产生柔性冲击,因此适用于中速的凸轮机构。 4-4 答:当ρ min <r T 时,则有ρ a <0,凸轮实际轮廓曲线不仅出现尖点,而且相 交,部分轮廓在实际加工中被切去,使从动件工作时不能达到预定的工作位置, 无法实现预期的运动规律,这种现象叫运动失真。当ρ min >r T 时,则可避免运动 失真。4-5 4-6 第5章 棘轮机构的结构简单、制造方便、运动可靠;齿式棘轮机构传动平稳、转角准确;但运动只能有级调节,且噪声、冲击和磨损都较大。磨檫式棘轮机构传动平稳、无噪声、可实现运动的无级调节;但运动准确性较差。因此,棘轮机构通常用于速度较低和载荷不大的场合,实现机械的间歇送料、分度、制动和超越离合器等运动。如自动线上的饿浇注输送装置,牛头刨床的横向进给机构。 槽轮机构的结构简单、制造方便、转位迅速,工作可靠,外形尺寸小,机械效率高。因此在自动机械中得到广泛应用。如在电影放映机中应用。 不完全齿轮机构优点是结构简单、制造方便,从动轮的运动时间和静止时间的比例不受机构的限制;缺点是从动轮在转动开始和终止时,角速度有突变,冲击较大故一般只用于低速、轻载场合。如果用于高速,则可安装瞬心附加杆使从动件的角速度由零逐渐增加到某一数值,使机构传动平稳。不完全齿轮机构常用于多工位自动机和半自动机工作台的间歇转位及某些间歇进给机构中,如蜂窝煤压制机工作台转盘的间歇转位机构。 凸轮式间歇机构的优点是运转可靠、传动平稳、承载能力较大;转盘可实现任何运动规律,以适应高速运转要求;转盘停歇时一般依靠凸轮棱边进行定位,不需要附加定位装置。缺点是凸轮加工精度要求较高。因此,凸轮式间歇机构常用于各种高速机械的分度、转位装置和步进机构中。 第6章 6-1 带传动的主要类型:摩擦带传动和啮合带传动。摩擦带传动按传动带的截 面形状又可分为:平带传动、V 型带传动、多楔带传动、圆带传动。 带传动的特点:(1)传动平稳,噪声小 (2)过载打滑保护 (3)带传动的中心距大,结构简单,制造、安装和维护较方便, 且成本低 (4)因存在弹性滑动,故传动比不稳定,且传动效率较低 (5)不宜在酸、碱等恶劣环境下工作 6-2 有效圆周力F :紧边与松边的拉力之差。 初拉力F 0:不工作时,带两边承受的相等的拉力,叫初拉力。 两者关系:1 1 20+-=fa fa e e F F ,F 与F 0成正比。 6-3弹性滑动的原因:由于带的弹性变形而产生的带与带轮间的滑动。 打滑的原因:过载。 影响:弹性滑动使从动轮的圆周速度小于主动轮的圆周速度。打滑:过载保护。 弹性滑动不可避免,打滑可以避免。 6-4带截面上存在的应力:紧边拉应力、松边拉应力、离心力产生的拉应力、带弯曲变形产生的拉应力。应力分布见图6-4。紧边绕入小带轮时所受的应力最大。 6-5小带轮包角增大,有效拉力F 也增大。由于大带轮的包角大于小带轮的包角,故打滑首先发生在小带轮上,所以只给出小带轮包角的公式。 6-6一般情况,带传动的打滑多发生在小带轮上,因为大带轮的包角大于小带轮的包角。 6-7 带的基准长度:V 带在规定的张紧力下,带与带轮基准直径相配处的周线长度。 带轮基准直径:和V 带节宽相对应的带轮直径称为基准直径。 6-8 V 带传动的设计准则:在保证带传动不打滑的条件下,使带具有一定的疲劳强度和寿命。 6-9 验算带速:带速高则离心力增大,使带与带轮间的摩擦力减小,传动易打滑,且带的绕转次数多,使带的寿命降低。带速低则带传递的圆周力增大,带的根数增多。 6-10 带传动的张紧装置:(1)当小带轮包角小于120°;(2)当带传动工作一段时间后,会因为产生变形而松弛,使张紧力减小,故带传动要设置张紧装置。 张紧方法:(1)调整中心距 (2)采用张紧轮。 6-11 []0P :许用功率;0P :单根普通V 带的基本额定功率;0P ?:单根普通V 带的基本额定功率增量;a K :包角系数;L K :带长修正系数。 0P ?:考虑实际传动比1≠i 时,V 带绕过大带轮所受的弯曲应力比特定条件下的 小,额定功率的增大值;a K :考虑包角?≠180α时包角对传递功率的影响;L K 考虑带为非特定长度时带长对传递功率的影响。 6-12 max v v 或 v 5m/s :应重选带轮直径; α:适当增大中心距或加张紧轮等方法; 120 ? Z太多:重选带的型号。 6-13与带传动相比,链传动的优点如下:链传动能得到准确的平均比;链条不需要太大的张紧力,故对轴的作用力小,传递的功率较大,低速时能传递较大的圆周力。可在高温、油污、潮湿、日晒等恶劣环境下工作。 链传动的缺点如下:传动平稳性差,不能保证恒定的瞬时链速和瞬时传动比;链的单位长度重量较大,工作时有周期性的动载荷和啮合冲击,引起噪声;链节的磨损会造成节距加长,甚至使链条脱落,速度高时,尤为严重,同时急速反向性能差,不能用于高速。 6-14当链条连成环形时,正好是外链板和内链板相接,接头处可用开口销或弹簧锁紧,若链节数为奇数,则需采用过渡链节,在链条受拉时,过渡链节还要承受附加的弯曲载荷,所以通常应采用偶数链节。 6-15 710.87N 6-16 v=9.42m/s α=172.36° F=530.78N 6-17略 6-18 2.5 第7章 课后练习题的答案7-21 (1)θ k =3.4°,α k =31°,ρ k =36.05mm. (2)r=63.85mm, θ k =0.014904(rad), ρ=21.84mm. 7-22 分度圆直径d:38mm 齿顶圆直径d a :42mm 齿根圆直径d f :33mm 基圆直径 d b :36mm 齿距 p :6.28mm 齿厚 s :3.14mm 齿槽宽 e:3.14mm 7-23 模数 m :3mm 分度圆直径d: 60mm 齿顶圆直径d a :66mm 齿根圆直径d f :52.5mm 7-24 模数 m :5mm 齿顶高系数 h a *:1 7-25 可行齿轮的齿数z 2 :52个 模数 m:2.5mm 分度圆直径 d:130mm 齿顶圆直径 d a :135mm 齿根圆直径 d f :123.75mm 7-26 齿顶高h a :3mm 齿根高h f :3.75mm 全齿高h:6.75mm 顶隙c:0.75mm 分度圆直径d:120mm 基圆直径d b :112.76mm 齿顶圆直径d a :133.5mm 齿根圆直径d f :112.5mm 齿距p:3π 齿厚s:1.5π 齿槽宽e:1.5π 7-27 7-28 因为:模数相等,压力角相等 所以可以啮合。 7-29 (1):1号和4号的相同。 (2):1号和2号能正确啮合。 7-30 (1)齿轮2的轮齿旋向为右旋,齿轮3的轮齿旋向为右旋,齿轮4的轮齿旋向为左旋。 齿轮1轴向力方向向下,齿轮2的轴向力方向向上,齿轮3轴向力方向向下,齿轮4的轴向力方向向上。 (2)β3=6°57′14″ 7-31 中心距a :150mm 7-32 当a=90时 螺旋角β不存在 当a=95时 螺旋角β等于14o 分度圆直径d :54mm 齿顶圆直径d a :59mm 齿根圆直径d f :47.75mm 当量齿数z v :23 7-33 中心距a 是:117.569mm 当a=115时 螺旋角β不存在。 当a=120时 螺旋角β等于16o35′52″。 7-35 d 1=103.53mm,d 2=414.11mm,d a1=111.53mm,d a2=422.11mm,d f1=93.53mm,d f2=404.11mm , a=258.82mm. 7-36 d 1=110mm,d 2=330mm,d a1=119.49mm,d a2=333.16mm,d f1=98.61mm,d f2=326.21mm, δ1=18.4°,δ2=71.6°, δa1=20.05°,δa2=73.25°,δf1=16.42°,δf2=69.62°, R=173.93mm,Z V1=23.19, Z V2=209.09. 7-37 齿轮3的轮齿旋向为右旋。 第8章 8-1 特点:传动比大,结构紧凑;传动平稳,噪声小;可制成具有自索性的蜗杆;传动效率低;蜗轮的造价较高。 使用条件:用于传递空间两交错轴之间的运动和动力,通常两轴交错角为 90°。 8-2 传动比计算:1 2 21z z n n i == 不能用分度圆直径之比表示传动比。因为当蜗杆转过一周时,蜗轮将转过1 z 个齿。 8-3与齿轮传动相比,蜗杆传动的失效形式的特点如下:蜗杆传动的失效形式主要是蜗轮齿面的磨损、胶合和点蚀等。因为蜗杆传动中由于蜗杆为连续的螺旋齿,且其材料的强度高于蜗轮轮齿的强度,所以失效总是发生在蜗轮轮齿上。由于蜗杆传动的相对滑动速度大,发热量大而效率低,故传动的失效形式主要是蜗轮齿面的磨损、胶合和点蚀等。 8-4中间平面:通过蜗杆轴线并垂直于蜗轮轴线的剖面。 在中间平面内蜗杆和蜗轮的啮合相当于渐开线齿轮与齿条的啮合。该平面内的参数为标准值。 8-5因为蜗杆传动齿面间存在较大的相对滑动,摩擦损耗大,传动的效率较低。一般为0.7~0.8,具有自锁性的蜗杆传动,效率小于0.5。 8-6由于蜗杆齿呈连续的螺旋状,它与蜗轮齿的啮合是连续不断地进行的,同时啮合的齿数较多,故传动平稳,噪声小。 8-7由于蜗杆传动的效率低,发热量大,若不及时散热,将引起箱体内的油温升高,粘度降低,润滑失效,导致齿面磨损加剧,甚至胶合。因此要依据单位时间内的发热量等于同时间内的散热量进行热平衡计算,以保证油温稳定地处在规定的范围内。 当热平衡不满足时,应采取下列措施:在箱体外表面设置散热片,以增加散热面积;在蜗杆轴上安装风扇;在箱体油池内安装蛇形冷却水管,用循环水冷却;利用循环油冷却。 8-8准则:对闭式蜗杆传动,一般按齿面接触疲劳强度设计,按齿根弯曲疲劳强度校核和热平衡核算;对开式蜗杆传动或传动时载荷变动较大,或蜗轮齿数大于90的蜗杆传动,通常只需按齿根弯曲疲劳强度进行设计。当蜗杆直径较小而跨距较大时,还应作蜗杆轴的刚度验算。 8-9 蜗杆一般采用碳钢或合金钢,蜗轮常采用青铜或铸铁。 设计时选材:除了要有足够的强度外,更重要的是要有良好的减摩性、耐磨性和抗胶合能力。蜗杆传动较理想的配对材料是钢和青铜。 8-10 8-11 第9章 9-5 v=628mm/min,方向向左 9-6 Z b =45,Z c =48 9-7 进给速度是50mm/min.方向是向右。 9-8 轮系的类型是行星轮系, 9-9 i 1H =1+Z 3*(Z 6+Z 4)/Z 1*Z 4 9-10 Z2=68 9-11 N3=872r/min 第10章 10-2 祥见教材P157表10—1 10-3 增加联结刚度、紧密性和提高放松能力 10-5 解:σB =900MPa ,σS =720MPa 。 螺母应选用35钢,9级,需要进行热处理。 10-6 解:280*3.14/8=109.9在﹛3d ﹜~﹛7d ﹜之间,故满足紧密性要求。 10-7 解:右d 1= ,F= 2cFs fm 推出: F S = []216.28 5.2fm d C σ= 30036.28**17.294*0.2*2 5.2*1.2=69 6.2N 所以该联结允许传递的静载荷为696.2N 。 10-8 (1)求螺栓所受预紧力:F ′=8888.89N (2)确定需用应力:根据材料是Q235可知σ =400Mpa, σs=240Mpa.查表得安 B 全系数s=4.所以[σ]= σs /s=60Mpa. (3).螺栓直径d =15.66mm 查机械设计手册:选择螺栓型号是:M16×80螺母 1 的型号是M16. ≥6*4=6.23mm 10-9 解:d 1 所以螺纹小径应大于6.23mm,查表可以选用M8。 =500Mpa, σs=400Mpa. 10-10 (1)根据材料35钢知道,σ B (2)总拉力F Q 每个螺栓所受的工作载荷为 F=5887N查表得F″=1.6F =F+ F″=1533.7N 则F Q (3)计算所需螺栓直径和数量 =15.41mm. 查手册得螺栓型查表得安全系数s=2.则[σ]=400/2=200Mpa d 1 号为M16× 10-12 平键的下面与轴上键槽贴紧,上面与轮毂键槽顶面留有间隙。两侧面为工作面,依靠键与键槽之间的挤压力传递功率。加工容易、装拆方便、对中性好,应用非常广泛。 10-13 螺钉紧定。 10-14 教材P167—169之间。 10-16 小径定心和齿形定心 10-19 解:键的尺寸为b=14,h=9,l=80。键槽宽度为14,深度为轴t=5.5,=3.8,键槽半径为最小0.25,最大0.40。 轴毂t 1 10-20 首先计算转矩T=9550.P/n=172.29N.m 所以可以选择的联轴器型号是:TL6 10-21 解:由于电动机轴的直径为42 mm,故联轴器内孔直径应为42 mm查表初选TL7,校核:n=960≤〔n〕=3600,故最终选用TL7联轴器。 第11章 11-1 电动机轴,转动轴;火车轮轴,心轴;车床的主轴,空心轴。 11-2 轴上与轴承配合的部分称为轴颈,与轮毂配合的部分称为轴头,联接轴颈和轴头的非配合部分统称为轴身,直径大且呈环状的短轴段称为轴环,截面尺寸变化的台阶处称为轴肩。 11-3 估算轴的最小直径是进行后续轴的设计计算的前提条件。 11-4 轴的常用材料有碳素钢、合金钢、球墨铸铁等。 工程中常用35、45、50等优质碳素钢,其中以45钢用得最为广泛。其价格低廉,对应力集中敏感性较小,可以通过调质或正火处理以保证其机械性能,通过表面淬火或低温回火以保证其耐磨性。对于轻载和不重要的轴也可采用Q235、Q275等普通碳素钢.合金钢常用于高温、高速、重载以及结构要求紧凑的轴,有较高的力学性能,但价格较贵,对应力集中敏感,所以在结构设计时必须尽量减少应力集中。球墨铸铁耐磨、价格低、吸振性好,对应力集中的敏感性较低,但可靠性较差,一般用于形状复杂的轴,如曲轴、凸轮轴等。 11-5 主要应考虑轴上零件的轴向定位、固定和周向固定:为了保证轴上零件靠紧定位面,轴肩处的圆角半径R必须小于零件内孔的圆角R1 或倒角C1;轴上零件的轴向固定就是不允许轴上零件沿轴向窜动。轴上零件的周向固定是保证轴 上的传动零件与轴一起转动。 制造工艺和装配工艺要求:制造工艺要求是指轴的结构应尽可能便于加工,节约加工成本。为此,轴端倒角的尺寸应尽量一样,轴肩的圆角半径也要尽可能相同。若轴上采用多个单键联接时,键宽应尽可能统一,并在同一加工直线上。在磨削和车螺纹的轴段应有砂轮越程槽和螺纹退刀槽。 标准尺寸要求:轴上的零件多数都是标准零件,如滚动轴承、联轴器、圆螺母等,因此与标准零件配合处的轴段尺寸必须符合标准零件的标准尺寸系列。 提高轴的疲劳强度:加大轴肩处的过渡圆角半径和减小轴肩高度,就可以减少应力集中,从而提高轴的疲劳强度。提高轴的表面质量、合理分布载荷等也可以提高轴的疲劳强度。 11-6 提高轴的疲劳强度主要是加大轴肩处的过渡圆角半径和减小轴肩高度,就可以减少应力集中,从而提高轴的疲劳强度。提高轴的表面质量、合理分布载荷等也可以提高轴的疲劳强度。 11-7 为了保证轴上零件靠紧定位面,轴肩处的圆角半径R必须小于零件内孔的圆角R1 或倒角C1; 轴肩高度一般取h=(0.07~0.1)d。 11-8 左端轴承内圈没有左固定;内圈右端轴肩高度过高;齿轮与轴连接的键槽位置不对,应开在轴段的中部;齿轮右端没有固定;两个键槽应该开在同一条线上;带轮右端固定不合适;右侧轴承没有右端固定。 第12章 12-1滑动轴承按所承受的载荷方向不同分向心滑动轴承,推力滑动轴承,向心滑动轴承用于承受径向载荷,推力滑动轴承用于承受轴向载荷. 12-2 常用的轴瓦材料有:轴承合金,青铜,黄铜,铸铁,塑料,橡胶及粉末冶金等. 轴承合金疲劳强度低且价格贵,固用于轴承衬. 12-3开油孔、油沟的作用是为了把润滑油导入轴承工作表面。开设原则是:(1)油沟长度应比轴瓦短。(2)油孔和油沟应开在非承载区。 12-4验算平均强度p是为防止轴颈与轴瓦间的润滑油被挤出而发生过渡磨损.验算pv值是为了防止轴承因温度升高过热,导致润滑不良或失效发生胶合.验算速度v是为防止滑动速度过高而加速磨损. 12-5 (略) 12-6 (略) 12-7 (略) 12-8 (略) 12-9 (略) 12-10 (略) 12-11 (略) 12-12 解:材料ZCuSn5PB5Zn5的性能参数分别为[p]=8MPa,[pv]=15MPa ·m/s,[v]=3m/s (1)验算平均压强 ][5.280 8016000p dB F p r <=?== (2)验算pv 值 ][05.180 19100100 1600019100pv B n F pv r <=??== (3)验算v 值 ][42.010******* 8014.3100060v dn v <=???=?=π 12-13 解:6208轴承的基本额定静载荷为18KN ,071.018000 1270 0==C F a ,应用线性差值法求得e 值为:271.026.0)056.0071.0(056 .0084.026 .028.0=+---= e , e F F r a >==423.03000 1270,取X =0.56,Y 值用线性差值法求得: 63.1)056.0071.0(056 .0084.071 .155.171.1=---+ =Y 3750)127063.1300056.0(1)(=?+??=+=a r p YF XF f P 12-14 解:6307轴承的基本额定动载荷为33.2KN , h L P C f n L h T h 8000][82000)2100 332001(8006010)(60103 66=>=??==ε 此轴承满足要求。 12-15 解:依题意d=30mm ,试选6006轴承,查手册得 C =13200N ,C 0=8300N 。 072.08300 600 0==C F a 应用线性差值法求得e 值为: 271.026.0)056.0072.0(056 .0084.026 .028.0=+---= e , e F F r a >==45.01320 600,取X =0.56,Y 值用线性差值法求得: 62.1)056.0072.0(056 .0084.071 .155.171.1=---+ =Y 2.1711)60062.1132056.0(1)(=?+??=+=a r p YF XF f P h L P C f n L h T h 5000][5274)2 .1711132001(14506010)(60103 66=>=??==ε 可知所选6006轴承合适。 12-16 解:(1)计算轴承轴向力1a F 、2a F 查表12-13 7310AC 轴承内部轴向力的计算公式为r s F F 68.0=,故有: N F F N F F r s r s 6.3702544568.068.06.64294568.068.02211=?===?== 绘出计算简图 2 1 S2r1 F A 因为 216.244218006.624s A s F F F <=+=+ 故可判定轴承1被压紧,轴承2被放松,两轴承的轴向力分别为: N F F F N F F A s a s a 6.190237022122=-=== (2)计算当量动载荷1P 、2P 由表12-12,查得e=0.68,而: e F F e F F r a r a ===>==68.05445 6 .370201.29456 .19022211 查表12-12可得:0187.041.02211====Y X Y X 则轴承的当量动载荷为: N F Y F X f P N F Y F X f P a r P a r P 653454452.1)(3.2451)6.190287.094541.0(2.1)(2222211111=?=+==?+??=+= (3)计算轴承寿命h L 因21P P >,且两轴承型号相同,所以只计算轴承2寿命,7310AC 轴承的额定动载荷为C =55500N,取3,1==εT f ,故 h L P C f n L h T h 1000][10639)6534 555001(9606010)(60103 66=>=??==ε 故轴承满足要求。 12-17 解:(1)计算轴承所受载荷 斜齿轮的转矩T 为:mm N n P T ??=??=?=566106.32005 .71055.91055.9,分度圆直 径mm z m d n 6.31015 cos 100 3cos =?== β,斜齿轮所受圆周力t F 、径向力R F 、轴向力A F 分别为: ??? ? ? ? ???=?===?===??==N F F N F F N d T F t A n t R t 62115tan 2318tan 87415cos 20tan 2318cos tan 23186.310106.3225 ββα 由于对称布置,轴承所受径向力N F F R r 4372 2==,N F F A a 6212== 2 1r2 F r1 F A (2)试选6211轴承进行计算。 该轴承C=43200N.C 0=29200N 。021.029200/621/02==C F a ,应用线性插值得e=0.205 e F F r a >== 42.1437 621 /22,取X =0.56,Y 值应用线性插值求得Y =2.145 N YF XF f P a r p 1735)621145.243756.0(1.1)(222=?+??=+= h L P C f n L h T h 40000][1286000)1735 432001(2006010)(60103 626=>=??==ε 故此轴承满足要求。 12-18 参考图如下。 第13章 保持稳定,但瞬时速度随着外力等因素的变化而产生的波动。13-1 (1)速度ω n (2)非周期波动。 13-2 对于周期性波动:使其速度波动被限制在允许的范围内;对于非周期性波动:采用特殊的机构来调节内燃机能量的供给量,使其产生的功率与发电机所需相适应。 13-3 (1)消除或部分消除惯性力和惯性力矩的影响,尽可能减轻有害的机械振动。 (2)刚性回转件的静平衡是利用在刚性回转件上加减平衡质量的方法,使质心回到回转轴线上,从而使回转件的惯性力得以平衡的一种平衡措施。动平衡:分布于该回转件上各个质量的离心力的合理等于零,同时离心力所引起的力 偶的合力偶矩也等于零。 一、填空题 1 作平面运动的三个构件共有___3__个瞬心,它们位于_ 一条直线__ 上。 2带传动工作时,带中的应力由以下三部分组成(1)紧边和松边拉力产生的拉应力、(2)离心力产生的拉应力、(3)弯曲应力。最大应力发生在紧边进入小带轮处。 3 带传动的主要失效形式是打滑和疲劳破坏___ 。 4 一对渐开线直齿圆柱齿轮正确啮合条件是:模数相等__ 和分度圆压力角相等。 5 在矩形螺纹、锯齿形螺纹和三角形螺纹三种螺纹中,传动效率最高的是矩形 螺纹,自锁性最好的是三角形螺纹,只能用于单向传动的是锯齿形 螺纹。 6螺纹的公称直径是大径,确定螺纹几何参数关系和配合性质的直径是中径。 7普通平键的工作面为键的__侧__面,楔键的工作面为键的_上下表___面,普 通平键的截面尺寸h b 是根据___轴径_ 确定的。 8代号为62308的滚动轴承,其类型名称为深沟球轴承,内径为 40 mm,2 为宽度系列代号, 3 为直径系列代号。 9在凸轮机构四种常用的推杆运动规律中,等速运动规律有刚性冲击;等加速等减速运动规律和余弦加速度运动规律有柔性 冲击;正弦加速度运动规律无冲击。 10自由度数目为 1 的周转轮系称为行星轮系。 11在齿轮传动设计时,软齿面闭式传动常因_____齿面点蚀_ 而失效,故通常先按__齿面接触疲劳__ 强度设计公式确定传动的尺寸,然后验算齿轮的 ____齿根弯曲疲劳____ 强度。 二、问答题 1.按轴工作时所承受的载荷不同,可把轴分成几类如何分类 答:根据轴工作时承受的载荷情况,可以将轴分成三类: 一、转轴:既承受转矩也承受弯矩; 二、心轴:只承受弯矩不承受转矩; 三、传动轴:只承受转矩不承受弯矩 填空题 1. 机电一体化技术的内涵是微电子技术和机械技术渗透过程中形成的一个新概念。 2. 机电一体化系统(产品)是机械技术和微电子技术的有机结合。 3. 工业三大要素是物质、能量、信息;机电一体化工程研究所追求的三大目标是:省能源、省资源、智能化。 4. 机电一体化研究的核心技术是接口问题。 5. 机电一体化系统(产品)构成的五大部分(或子系统)是:机械系统、电子信息处理系统、能源系统、传感信息系统、执行控制系统。 6. 机电一体化接口按输入/输出功能分类机械接口、物理接口、信息接口、环境接口。 7. 机电一体化系统(产品)按设计类型分为:开放性设计、适应性设计、变异性设计。 8. 机电一体化系统(产品)按机电融合程度分为机电一体化系统(产品)按机电融合程度分为:机电互补法、机电结合(融合)法、机电组合法。 9. 机电一体化技术是在机械的主功能、动力功能、信息功能、控制功能基础上引入微电子技术,并将机械装置与电子装置用相关软件有机地结合所构成系统的总称。 10.机电一体化系统实现三大功能应具有的两大重要特征(转换作用方式): 以能源转换为主和以信息转换为主。 11. 丝杠螺母机构的基本传动形式有:螺母固定丝杆转动并移动、丝杆转动螺母移动、螺母转动丝杆移动、丝杆固定螺母转动并移动四种形式种形式。 12. 滚珠丝杠副按螺纹滚道截面形状分为单圆弧和双圆弧两类;按滚珠的循环方式分为外循环和内循环两类。 13. 滚珠丝杠副轴向间隙调整与预紧的基本方法有:双螺母螺纹预紧调整、双螺母齿差预紧调整、双螺母垫片调整预紧、弹簧自动调整预紧四种方式。14. 滚珠丝杠副常选择的支承方式有:单推——单推式、双推——双推式、双推——简支式、双推——自由式。 15. 机电一体化系统(产品)常用齿轮传动形式有定轴轮系、行星轮系和谐波轮系三种形式三种形式。 16. 在机电一体化系统机械传动中,常用的传动比分配原则有:重量最轻原则、转动惯量最小原则、传动精度最优原则等。 17. 常用导轨副的截面形式有:三角形导轨、矩形导轨、燕尾形导轨、圆形导轨四种形式。 18. 导轨刚度主要指:结构刚度、接触刚度和局部刚度。 19. 机电一体化系统(产品)中,常可选择的执行元件:电磁式、液压式、气压式和其他形式的执行元件。 20. 电动机的工作特性分为恒转矩工作和恒功率工作两个阶段,其转折点的转速和功率分别称为:额定转速和额定功率;伺服电动机用于调速控制时,应该工作在恒转矩工作阶段。 21. 步进电机按转子结构形式可分为:反应式(变磁阻式)步进电机、永磁式步进电机、混合式步进电机三种。 22. 步进电机的工作方式有:单拍工作方式和倍拍工作方式。 1、Don 'tlet the failure discourag y e ou.Try again. 2、He dropped out of college after only two weeks. 3、He spoke very highly of her. 4、Peter took advantage of his visit to London to improve his English. 5、The chairman agreed to conside r my suggestion. 6、The idea needs to be tried out. 7、The new road is a major government project. 8、This is our greatest and most encouraging progress; in short,a triumph. 9、The house has belonged to our family for a long time. 10、There was a pause in the talk when Mary came in. 11、We all look forward to your next visit to Nanjing. 12、She discovered that she had lost her purse. 13、The plane will land in five minutes. 14、It used to be thought that the earth was flat. 15、Everyone is fascinated by the singer 's amazing voice. 16、My parents are thinking of spending their holiday in France. 17、She's very modes t about her success. 18、Most plants require sunlight. 19、Be careful to your words when talking to elderly people. 20、Mother called again to make certain that the new air-conditioner would be delivered the next day. 21、I presented a bunch of flowers to Mrs.Link last Christmas. 22、Jack wrapped the gift in a piece of colored paper. 23、Shall I make the introduction?Robert,this is Julia. 24、My mom cleans the house every day and keeps everything in order. 25、This idea appeared in many books. 26、The People's Republic of China was founded in 1949. 27、When will the work on the highway be completed? 28、Oranges are my favorite fruit. 29、Hans Andersen created many lovely characters. 30、The business has expanded from having one office to having twelve. 31、Did you have fun at Disneyland last summer? 32、His lies brought to an end his friendship with Mike. 33、I'll help you as far as I can. 34、He had included a large number of funny stories in the speech. 35、These greenbelts protect 500,000 acres of farmland against moving sands. 36、The TV program is shown to call people's attention to water pollution in China. 37、 A soft wind caused ripples on the surface of the lake. 38、The children formed a circle around her. 39、My mother measured me for a new dress. 40、The park lies at the center of the city. 41、The train would pull out soon. We ran like mad to catch it. 42、My old grandmother has difficulty in remembering things. 43、The company employed about 100 men. 44、She checked the letter before sending it. 7-1解:(1)先求解该图功的比例尺。 (2 )求最大盈亏功。根据图7.5做能量指示图。将和曲线的交点标注, ,,,,,,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-” 号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做 ,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭 矢量。由图知该机械系统在区间出现最大盈亏功,其绝对值为: (3 )求飞轮的转动惯量 曲轴的平均角速度:; 系统的运转不均匀系数:; 则飞轮的转动惯量: 图7.5图7.6 7-2 图7.7 图7.8 解:(1)驱动力矩。因为给定为常数,因此为一水平直线。在一个运动循环中,驱 动力矩所作的功为,它相当于一个运动循环所作的功,即: 因此求得: (2)求最大盈亏功。根据图7.7做能量指示图。将和曲线的交点标注, ,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏 功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功; 其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。 由图知该机械系统在区间出现最大盈亏功。 欲求,先求图7.7中的长度。如图将图中线1和线2延长交于点,那么在中, 相当于该三角形的中位线,可知。又在中,,因此有: ,则 根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则 。 (3)求飞轮的转动惯量和质量。 7-3解:原来安装飞轮的轴的转速为,现在电动机的转速为,则若将飞轮 安装在电动机轴上,飞轮的转动惯量为: 7-4解:(1)求安装在主轴上飞轮的转动惯量。先求最大盈亏功。因为是最大动能与最小 动能之差,依题意,在通过轧辊前系统动能达到最大,通过轧辊后系统动能达到最小,因此: 则飞轮的转动惯量: (2)求飞轮的最大转速和最小转速。 ------单选 滚珠丝杠螺母副结构类型有外循环插管式和_________等类型. 收藏 A. 内循环反向器式 B. 外循环反向器式 C. 内、外双循环 D. 内循环插管式 回答错误!正确答案: B PWM指的是________. 收藏 A. 计算机集成系统 B. 可编程控制器 C. 机器人 D. 脉宽调制 回答错误!正确答案: D 检测环节能够对输出进行测量,并转换成比较环节所需要的量纲,一般包括传感器和_______. 收藏 A. 转换电路 B. 调制电路 C. 控制电路 D. 逆变电路 回答错误!正确答案: A 下列关于机电一体化的说法中正确的是________. 收藏 A. 机电一体化设计主要是指产品的设计,不需要系统论方面的知识 B. 机电一体化技术是由传统机械技术及电子技术两方面技术构成 C. 机电一体化是指机电一体化技术,而不包含机电一体化产品 D. 机电一体化技术是以机械为主体 回答错误!正确答案: D 伺服控制系统一般包括控制器、被控对象、执行环节、比较环节和_________等个五部分. 收藏 A. 换向结构 B. 检测环节 C. 存储电路 D. 转换电路 回答错误!正确答案: B 电压跟随器的输出电压________输入电压. 收藏 A. 大于等于 B. 大于 C. 小于 D. 等于 回答错误!正确答案: D 滚珠丝杠螺母副结构类型有两类:外循环插管式和________. 收藏 A. 内循环反向 B. 内循环插管式 C. 外循环反向器式 D. 内、外双循环 回答错误!正确答案: A 受控变量是机械运动的一种反馈控制系统称________. 收藏 A. 伺服系统 B. 工业机器人 C. 顺序控制系统 D. 数控机床 回答错误!正确答案: A 下列关于机电一体化系统的伺服系统稳定性说法中错误的是________. 收藏 A. 机械设计基础试题一参考答案 复习题答案(经典) 一、单选题: 1.B 2.B 3.A 4.C 5.A 6.A 7.A 8.C 9.A 10.C 11.B 12.B 13.B 14.A 15.B 16.B 17.A 18.C 19.A 20.B 21.A 22.A 23.A 24.B 25.B 26.A 27.A 28.C 29.C 30.B 二、判断题: 1.正确 2.错误 3.错误 4.错误 5.错误 6.正确 7.正确 8.正确 9.错误 10.错误 三、填空题: 1. 通用化 2 剧烈 3. F >o ,且机构的自由度数等于原动件个数 4. 转动 移动 5. 等速运动 等加速一等减速运动 余弦加速度运动 正弦加速度运动 6. 长度 7. 紧边上进入小轮 8. A 系列滚子链,节距为25.4mm ,单排链,链节数为100节 9. 弯曲 平直 不能 10. 疲劳折断 11. 节点 齿根受拉的一边 1 2. 中 1 3. 基圆 14. 热平衡 胶合 15. 轮齿啮合时的摩擦损耗 轴承摩擦损耗 传动件的搅油损耗 16. 上下 17. 大径 小径 侧面 18. 碳钢 45 19. 低碳钢和45钢 20. 标准直径 21. 退刀槽 越程槽 22.弯矩 转矩 23. 接合元件工作表面间的摩擦力 24. 通过分别具有凸槽和凹槽的两个半联轴器的相互嵌合来)对中;另一种是(通过铰制孔用螺栓与孔的紧配合 25. 传递运动和扭矩,用来联接两轴,使一起回转,在停机时,才能使两轴分开 26. 离合器可在机器工作中随时完成两轴的结合或分离,联轴器一定要停机后才能完成两轴的接合或分离 27在机器运转时,能否随时将二轴接合或分离 28. 传递运动和扭矩,机器运转过程中随时能将主动、从动轴接合或分离 四、简答题: 1. 链传动的润滑方式是根据链速和链节距的大小推荐的润滑方式选取。 常用润滑装置:油壶或油刷,油杯,油池,甩油盘,油泵。 常用润滑油:采用全损耗系统用油:LA —N32,LA —N46,LA —N68,LA —N100,LA —N150。温度低用粘度小的油(前者)。温度高用粘度大的油。对于开式及重载低速传动,可在润滑油中加入2MoS 、2WS 或2MoSe 、2Wse 等添加剂。 机电一体化复习题(附答案) 机电一体化复习题 一、名词解释 1机电一体化 2伺服控制 3闭环控制系统 4逆变器 5 SPWM 6单片机 7 I/O接口 8 I/O通道 9 串行通信 10直接存储器存取(DMA) 二、判断题: 1 在计算机接口技术中I/O通道就是I/O接口。 (×) 2 滚珠丝杆不能自锁。(√) 3 无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。(×) 4 异步通信是以字符为传输信息单位。(√) 5 同步通信常用于并行通信。(×) 6 无条件I/O方式常用于中断控制中。(×)7从影响螺旋传动的因素看,判断下述观点的正确或错误 (1)影响传动精度的主要是螺距误差、中径误差、牙型半角误差(√) (2)螺杆轴向窜动误差是影响传动精度的因素(√) (3)螺杆轴线方向与移动件的运动方向不平行而形成的误差是影响传动精度的因素(√)(4)温度误差是影响传动精度的因素(√) 三、单项选择题 1. 步进电动机,又称电脉冲马达,是通过( B )决定转角位移的一种伺服电动机。 A 脉冲的宽度 B 脉冲的数量 C 脉冲的相位 D 脉冲的占空比 2. 对于交流感应电动机,其转差率s的范围为(B)。 A.1 第一章 平面机构的自由度和速度分析 题1-1 在图示偏心轮机构中,1为机架,2为偏心轮,3为滑块,4为摆轮。试绘制该机构的运动简图,并计算其自由度。 题1—2 图示为冲床刀架机构,当偏心轮1绕固定中心A 转动时,构件2绕活动中心C 摆动,同时带动刀架3上下移动。B 点为偏心轮的几何中心,构件4为机架。试绘制该机构的机构运动简图,并计算其自由度。 题1—3 计算题1-3图a )与 图b )所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出)。 A B C 1 2 3 4 a) 曲柄摇块机构 A B C 1 2 3 4 b) 摆动导杆机构 题解1-1 图 题1-3图a)题1-3图b) 题1—4计算题1—4图a、图b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并判断机构的运动是否确定,图中画有箭头的构件为原动件。 题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。 题1—5图题解1—5图 题1-6 求出图示的各四杆机构在图示位置时的全部瞬心。 第二章 连杆机构 题2-1在图示铰链四杆机构中,已知 l BC =100mm ,l CD =70mm ,l AD =60mm ,AD 为机架。试问: (1)若此机构为曲柄摇杆机构,且AB 为曲柄, 求l AB 的最大值; (2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。 题2-2 如图所示的曲柄滑块机构: (1)曲柄为主动件,滑块朝右运动为工作 行程,试确定曲柄的合理转向,并简述其理由; (2)当曲柄为主动件时,画出极位夹角θ,最小传动角g min ; (3)设滑块为主动件,试用作图法确定该机构的死点位置 。 题2-3 图示为偏置曲柄滑块机构,当以曲柄为原动件时,在图中标出传动角的位置, 并给出机构传动角的表达式,分析机构的各参数对最小传动角的影响。 A C D 题2-1图 机械设计基础典型试题1 一、填空 1.一平面铰链四杆机构的各杆长度分别为a=350,b=600,c=200,d=700; (1) 当取c 杆为机架时,它为何种具体类型?_双曲柄机构__________;(2)当取 d杆为机架时,则为_曲柄摇杆机构__________。 2.曲柄摇杆机构中,摇杆为主动件时,__ _B________死点位置。 (A)不存在(B)曲柄与连杆共线时为(C)摇杆与连杆共线时为 3.为保证四杆机构良好的机械性能,____B_______不应小于最小许用值。 (A)压力角(B)传动角(C)极位夹角 4._____B______决定了从动杆的运动规律。 (A)凸轮转速(B)凸轮轮廓曲线(C)凸轮形状 5.凸轮机构中,凸轮基圆半径愈_____大______,压力角愈_____小______ ,机构传动性能愈好。 6.紧键联接与松键连联接的主要区别在于:前者安装后,键与键槽之间就存在有_____C______。 (A) 压紧力 (B) 轴向力 (C) 摩擦力 7.链“B18X80”的含义是________B型链宽度b=18mm,长度L=80mm_____________。 8.螺纹联接是指___利用螺纹零件把需要固定在一起的零件固连起来 __ 螺旋传动是指__利用螺纹零件实现回转运动转换成直线运动 9.螺纹的公称直径是指它的__外径_____,螺纹“M12X1.5”的含义为_____细牙螺纹外径12mm,螺距1.5__________________。 10.采用螺纹联接时,若被联接件总厚度较大,且材料较软,在需要经常装卸的情况下,宜采用___B ___________________。用于薄壁零件联接的螺纹,宜采用____D___________________。 (A) 螺栓联接(B) 双头螺栓联接 (C) 螺钉联接 (D) 三角形细牙 螺纹 (E) 三角形粗牙螺纹 (F) 矩形螺纹 11.某调整螺纹,采用双头粗牙螺纹,螺距为3mm,为使螺母相对螺杆沿轴向移 动12mm, 则螺杆应转___2______圈。 一、名词解释(每小题2分,共10分) 1、测量 2、灵敏度 3、压电效应 4、动态误差 5、传感器 二、填空题(每小题2分,共20分) 1、滚珠丝杆中滚珠的循环方式: _内旋换与外循环 2、机电一体化系统,设计指标与评价标准应包括___ _______, __________, __________ , __________。 3、顺序控制系统就是按照预先规定的次序完成一系列操作的系统, 顺序控制器通常用________。 4、某光栅的条纹密度就是50条/mm,光栅条纹间的夹角θ=0、001孤度, 则莫尔条纹的宽度就是_______________________。 5、连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制 每一个轴的______________________,使它们同步协调到达目标点。 6、某4极交流感应电机,电源频率为50Hz,转速为1470r/min,则转差率为_____________。 7、齿轮传动的总等效惯量与传动级数__________________________________________。 8、累计式定时器工作时有_____________________________________________________。 9、复合控制器必定具有__________________________________。 10、钻孔、点焊通常选用_______________________________________类型。 三、选择题(每小题2分,共10分) 1、一般说来,如果增大幅值穿越频率ωc的数值,则动态性能指标中的调整时间ts ( ) A、产大 B、减小 C、不变 D、不定 2、加速度传感器的基本力学模型就是( ) A、阻尼—质量系统 B、弹簧—质量系统 C、弹簧—阻尼系统 D、弹簧系统 3、齿轮传动的总等效惯量与传动级数( ) A、有关 B、无关 C、在一定级数内有关 D、在一定级数内无关 4、顺序控制系统就是按照预先规定的次序完成一系列操作的系统,顺序控制器通常用( ) A、单片机 B、2051 C、PLC D、DSP 5、伺服控制系统一般包括控制器、被控对象、执行环节、比较环节与检测环节等个五部分。 A 换向结构 B 转换电路 C 存储电路D检测环节 四、判断题(每小题2分,共10分) 1、伺服控制系统的比较环节就是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号。( ) 2、电气式执行元件能将电能转化成机械力,并用机械力驱动执行机构运动。如交流电机、直流电机、力矩电机、步进电 机等。( ) 3、对直流伺服电动机来说,其机械特性越硬越好。( ) 4、步进电机的步距角决定了系统的最小位移,步距角越小,位移的控制精度越低。( ) 5、伺服电机的驱动电路就就是将控制信号转换为功率信号,为电机提供电能的控制装置,也称其为变流器,它包括电压、 电流、频率、波形与相数的变换。( ) 五、问答题(每小题10分,共30分) 1、步进电动机常用的驱动电路有哪几种类型? 2、什么就是步进电机的使用特性? 3、机电一体化系统设计指标大体上应包括哪些方面? 一、名词解释(每小题2分,共10分) 1、就是人们借助于专门的设备,通过一定的方法对被测对象收集信息,取得数据概念的过程。 2、指在稳态下,输出的变化量ΔY与输入的变化量ΔX的比值。即为传感器灵敏度。 S=dy/dx=ΔY/ΔX 3、某些电介质,当沿着一定的方向对它施加力而使它产生变形时,内部就会产生极化现象,同时在它的两个表面上将产生 符号相反的电荷。当外力去掉后,它又重新恢复到不带电的状态,这种现象被称为压电效应。 4、动态误差在被测量随时间变化过程中进行测量时所产生的附加误差称为动态误差。 全新版大学英语综合教程第二版课后练习答案精编W O R D版 IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】 Unit1 Ways of Learning Vocabulary I 1. 1)insert 2)on occasion 3)investigate 4)In retrospect 5)initial 6)phenomen a 7)attached 8)make up for 9)is awaiting 10)not; in the least 11)promote 12)emerged 2. 1)a striking contrast between the standards of living in the north of the country and the south. 2)is said to be superior to synthetic fiber. 3)as a financial center has evolved slowly. 4)is not relevant to whether he is a good lawyer. 5)by a little-known sixteen-century Italian poet have found their way into some English magazines. 3. 1)be picked up; can’t accomplish; am exaggerating 2)somewhat; the performance; have neglected; they apply to 3)assist; On the other hand; are valid; a superior II 1)continual 2)continuous 3)continual 4)continuous 5)principal 6)principal 7)principle 8)principles 9)principal III 1.themselves 2.himself/herself 3.herself/by herself/on her own 4.itself 机械设计基础复习试题一 一、单项选择题(本大题共20小题,每小题2分,共40分) 在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。错选、多选或未选均无分。 1.在如图所示的单缸四冲程内燃机中,序号1和10的组合是( A ) A.机构 B.构件 C.零件 D.部件 2.机构具有确定相对运动的条件是( A ) A.机构的自由度数目等于主动件数目 B.机构的自由度数目大于主动件数目 C.机构的自由度数目小于主动件数目 D.机构的自由度数目大于等于主动件数目 3.在下列平面四杆机构中,无急回性质的机构是( C )。 A.曲柄摇杆机构 B.摆动导杆机构 C.对心曲柄滑块机构 D.偏心曲柄滑块机构 4.滚子推杆盘形凸轮机构设计中,为避免凸轮实际轮廓曲线失真,正确的方法是(D) A.增大滚子半径 B.增加从动件长度 C.减小基圆半径 D.增大基圆半径 5.在设计直动滚子从动件盘形凸轮机构时,若出现运动失真现象,则应( B ) A.减小凸轮基圆半径B.增大凸轮基圆半径 C.增大滚子半径D.增大从动件长度 6.在承受横向载荷的普通紧螺栓联接中,螺栓杆所受应力为(C) A.扭切应力 B.拉应力 C.扭切应力和拉应力 D.扭切应力或拉应力 7.普通平键传递扭矩是靠键的( C ) A.顶面B.底面 C.侧面D.端面 8.带传动中,υ1为主动轮圆周速度,υ2为从动轮圆周速度,υ为带速,这些速度之间存在的关系是( B ) A.υ1=υ2=υ B.υ1>υ>υ2 C.υ1<υ<υ2 D.υ1=υ>υ2 9.带传动正常工作时不能保证准确的传动比是因为( A ) 1 1、机电一体化系统中的计算机接口电路通常使用光电耦合器,光电耦合器的作用有哪些 1. (1)能保护系统元件不受高共模电压的损害,防止高压对低压信号系统的损坏。 (2)泄漏电流低,对于测量放大器的输入端无须提供偏流返回通路。 (3)共模抑制比高,能对直流和低频信号(电压或电流)进行准确、安全的测量。 2、什么是三相六拍通电方式 2. 如果步进电动机通电循环的各拍中交替出现单、双相通电状态,这种通电方式称为单双相轮流通电方式。如A → AB → B → BC →C → CA →… 3、简述PWM 脉宽调速原理。 3. 在一个周期T 内闭合的时间为τ,则一个外加的固定直流电压U 被按一定的频率开闭的开关S 加到电动机的电枢上,电枢上的电压波形将是一列方波信号,其高度为U 、宽度为τ,如右图所示。电枢两端的平均电压为: U U Udt U T T T d ρτ=== ?01 式中 ρ=τ/T=U d /U ,(0<ρ<1) ρ为导通率(或称占空比) 。 当T 不变时,只要改变导通时间τ,就可以改变电枢两端的平均电压Ud 。当τ从0~T 改变时,Ud 由零连续增大到U 。 5.传感器是一种以一定的精确度把被测量转换为与之有确定对应关系的,便于应用的某种物理量 的测量装置。敏感元件、转换元件、基本电路。 2、滚珠丝杠副的轴向间隙对系统有何影响如何处理 答。如果滚珠螺旋副中有轴向间隙或在载荷作用下滚珠与滚道接触处有弹性变形,则当螺杆反向转动时,将产生空回误差。为了消除空回误差,在螺杆上装配两个螺母1和2,调整两个螺母的轴向位置,使两个螺母中的滚珠在承受载荷之前就以一定的压力分别压向螺杆螺纹滚道相反的侧面,使其产生一定的变形,从而消除了轴向间隙,也提高了轴向刚度。常用的调整预紧方法有下列三种。垫片调隙式 螺纹调隙式 齿差调隙式 答。1机电一体化--从系统的观点出发,将机械技术 、微电子技术、信息技术、控制技术等在系统工程基础上有机地加以综合,以实现整个系统最佳化的一门新科学技术。 2、柔性制造系统:柔性制造系统(Flexible Manufacturing System )是由两台或两台以上加工 中心或数控机床组成,并在加工自动化的基础上实现物料流和信息流的自动化 5、感应同步器: 感应同步器是一种应用电磁感应原理制造的高精度检测元件,有直线和圆盘式两种,分别用作检测直线位移和转角。 2、伺服电动机是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动 力输出电动机 1.试分析图示传动系统中,齿轮减速器的传动误差对工作台输出精度的影响 解答: C语言程序设计习题参考答案 习题1 一、判断题 1.在计算机中,小数点和正负号都有专用部件来保存和表示。 2.二进制是由0和1两个数字组成的进制方式。 3.二进制数的逻辑运算是按位进行的,位及位之间没有进位和借位的关系。 4.在整数的二进制表示方法中,0的原码、反码都有两种形式。 5.有符号数有三种表示法:原码、反码和补码。 6.常用字符的ASCII码值从小到大的排列规律是:空格、阿拉伯数字、大写英文字母、小写英文字母。 解:1.F 2.T 3.T 4.T 5.T 6.T 二、单选题 1.在计算机中,最适合进行数值加减运算的数值编码是。 A. 原码 B. 反码 C. 补码 D. 移码 2.已知英文小写字母m的ASCII码为十进制数109,则英文小写字母y的ASCII码为十进制数。 A. 112 B. 120 C. 121 D. 122 3.关于ASCII码,在计算机中的表示方法准确地描述是。 A. 使用8位二进制数,最右边一位为1 B. 使用8位二进制数,最左边一位为1 C. 使用8位二进制数,最右边一位为0 D. 使用8位二进制数,最左边一位为0 4.设在机器字长4位,X=0111B,Y=1011B,则下列逻辑运算中,正确的是___________。 A. X∧Y=1000 B. X∨Y=1111 C. X⊕Y=0011 D. ˉY =1000 5.下列叙述中正确的是()。 A.高级语言就是机器语言 B.汇编语言程序、高级语言程序都是计算机程序,但只有机器语言程序才是计算机可以直接识别并执行的程序 C.C语言因为具有汇编语言的一些特性,所以是汇编语言的一种 D.C源程序经过编译、连接,若正确,执行后就能得到正确的运行结果 平面机构及其自由度 1、如图a所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。 解 1)取比例尺 绘制其机构运动简图(图b)。 l 图 b) 2)分析其是否能实现设计意图。 GAGGAGAGGAFFFFAFAF GAGGAGAGGAFFFFAFAF 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+?-?='-'-+-=F p p p n F h l 因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。 3)提出修改方案(图c )。 为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。 GAGGAGAGGAFFFFAFAF 图 c 1) 图 c 2) 2、试画出图示平面机构的运动简图,并计算其自由度。 解:3=n ,4=l p ,0=h p ,123=--=h l p p n F 解:4=n ,5=l p ,1=h p ,123=--=h l p p n F 3、计算图示平面机构的自由度。 GAGGAGAGGAFFFFAFAF 解:7=n ,10=l p ,0=h p ,123=--=h l p p n F 机械设计概述 1.1机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么? 答:机械设计过程通常可分为以下几个阶段: 1.产品规划主要工作是提出设计任务和明确设计要求。 2.方案设计在满足设计任务书中设计具体要求的前提下,由设计人员构思出多种可行方案并进行分析比较,从中优选出一种功能满足要求、工作性能可靠、结构设计可靠、结构设计可行、成本低廉的方案。 3.技术设计完成总体设计、部件设计、零件设计等。 4.制造及试验制造出样机、试用、修改、鉴定。 1.2常见的失效形式有哪几种? 答:断裂,过量变形,表面失效,破坏正常工作条件引起的失效等几种。 1.3什么叫工作能力?计算准则是如何得出的? 答:工作能力为指零件在一定的工作条件下抵抗可能出现的失效的能力。对于载荷而言称为承载能力。 根据不同的失效原因建立起来的工作能力判定条件。 1.4标准化的重要意义是什么? 答:标准化的重要意义可使零件、部件的种类减少,简化生产管理过程,降低成本,保证产品的质量,缩短生产周期。 摩擦、磨损及润滑概述 2.1按摩擦副表面间的润滑状态,摩擦可分为哪几类?各有何特点? 答:摩擦副可分为四类:干摩擦、液体摩擦、边界摩擦和混合摩擦。 干摩擦的特点是两物体间无任何润滑剂和保护膜,摩擦系数及摩擦阻力最大,磨损最严重,在接触区内出现了粘着和梨刨现象。液体摩擦的特点是两摩擦表面不直接接触,被液体油膜完全隔开,摩擦系数极小,摩擦是在液体的分子间进行的,称为液体润滑。边界摩擦的特点是两摩擦表面被吸附在表面的边界膜隔开,但由于边界膜较薄,不能完全避免金属的直接接触,摩擦系数较大,仍有局部磨损产生。混合摩擦的特点是同时存在边界润滑和液体润滑,摩擦系数比边界润滑小,但会有磨损发生。 2.2磨损过程分几个阶段?各阶段的特点是什么? 答:磨损过程分三个阶段,即跑合摩合磨损阶段、稳定磨损阶段、剧烈磨损阶段。各阶段的特点是:跑合磨损阶段磨损速度由快变慢;稳定磨损阶段磨损缓慢,磨损率稳定;剧烈磨损阶段,磨损速度及磨损率都急剧增大。 2.3 按磨损机理的不同,磨损有哪几种类型? 答:磨损的分类有磨粒磨损、粘着磨损、疲劳磨损点蚀、腐蚀磨损。 2.4 哪种磨损对传动件来说是有益的?为什么? 答:跑合磨损是有益的磨损,因为经跑合磨损后,磨损速度减慢,可改善工作表面的性质,提高摩擦副的使用寿命。 2.5如何选择适当的润滑剂? 答:选润滑剂时应根据工作载荷、运动速度、工作温度及其它工作条件选择。 当载荷大时,选粘度大的润滑油,如有较大的冲击时选润滑脂或固体润滑剂。高速时选粘度小的润滑油,高速高温时可选气体润滑剂;低速时选粘度小的润滑油,低速重载时可选润滑脂;多尘条件选润滑脂,多水时选耐水润滑脂。 2.6润滑油的润滑方法有哪些? 答:油润滑的润滑方法有分散润滑法和集中润滑法。集中润滑法是连续润滑,可实现压力润滑。分散润滑法可以是间断的或连续的。间断润滑有人工定时润滑、手动油杯润滑、油芯油杯润滑、针阀油杯润滑、带油润滑、油浴及飞溅润滑、喷油润滑、油零润滑等几种。 2.7接触式密封中常用的密封件有哪些? 答:接触式密封常用的密封件有O形密封圈,J形、U形、V形、Y形、L形密封圈,以及毡圈。 2.8非接触式密封是如何实现密封的? 答:非接触式密封有曲路密封和隙缝密封,它是靠隙缝中的润滑脂实现密封的。 1.什么是“机电一体化”?以打夯机为例,内含机械与电器,问这是不是机电 一体化产品? 答:机电一体化又称机械电子工程,是机械工程与自动化的一种,英语称为Mechatronics,它是由英文机械学Mechanics的前半部分与电子学Electronics 的后半部分组合而成。 打夯机不属于机电一体化产品。因为打夯机只是普通的机械加电器,它属于硬连接或者称为机械连接只能应用在就地或者小范围场合使用,不能满足大面积和远程控制。而机电一体化就不一样了,它不光有硬连接、机械连接还有软连接。机电一体化属于同时运用机械、电子、仪表、计算机和自动控制等多种技术为一体的一种复合技术。它不光可以就地操作,小范围应用,还可以大面积使用操作,远程监测、控制。 2.机电一体化的技术构成是什么? 答:机械技术、微电子技术、信息技术 3.产品实现机电一体化后,可以取得那些成效? 答:产品实现机电一体化后可以取得的成效:产品性能提高、功能增强、结构简化、可靠性提高、节约能源、改善操作、提高灵活性等。 4.数字量传感具有哪三种类型?他们有什么区别? 数字传感器按结构可分成三种类型: 1.直接式数字量传感器——其分辨率决定于数字量传感器的位数。 被测物理量→数字编码器→信息提取装置→数字量输出 2.周期计数式数字传感器 它的结构示意图如下图1所示。此种结构的位移分辨率对低精度的周期计数式数字传感器而言,仅由周期信号发生器的性质决定。例如,光栅当长1mm有100条刻线时,其分辨率即为0.01mm;对高精度的周期计数式数字传感器而言,还要考虑到电子细分数。如在100倍电子细分数下,此光栅的分辨率就是0.1μm。此种结构属于增量式结构,结构的特点(位移方向的要求)决定它不但备有辨向电路,而且周期计数器还具有可逆性质。 图1 周期计数式数字量传感器的结构方框图 3.频率式数字传感器 其结构示意图如下图2所示。按振荡器的形式,可将此种数字传感器分成带有晶体谐振器的和不带晶体谐振器的两种。前者,按被测量的作甩点,又分作用在石 C语言程序设计第二版 习题参考答案 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT- C语言程序设计习题参考答案 习题 1 一、判断题 1.在计算机中,小数点和正负号都有专用部件来保存和表示。 2.二进制是由0和1两个数字组成的进制方式。 3.二进制数的逻辑运算是按位进行的,位与位之间没有进位和借位的关系。 4.在整数的二进制表示方法中,0的原码、反码都有两种形式。 5.有符号数有三种表示法:原码、反码和补码。 6.常用字符的ASCII码值从小到大的排列规律是:空格、阿拉伯数字、大写英文字母、小写英文字母。 解:1.F2.T 3.T 4.T 5.T 6.T 二、单选题 1.在计算机中,最适合进行数值加减运算的数值编码是。 A. 原码 B. 反码 C. 补码 D. 移码 2.已知英文小写字母m的ASCII码为十进制数109,则英文小写字母y的ASCII 码为十进制数。 A. 112 B. 120 C. 121 D. 122 3.关于ASCII码,在计算机中的表示方法准确地描述是。 A. 使用8位二进制数,最右边一位为1 B. 使用8位二进制数,最左边一位为1 C. 使用8位二进制数,最右边一位为0 D. 使用8位二进制数,最左边一位为0 4.设在机器字长4位,X=0111B,Y=1011B,则下列逻辑运算中,正确的是 ___________。 A. X∧Y=1000 B. X∨Y=1111 C. X⊕Y=0011 D. ˉY=1000 5.下列叙述中正确的是()。 A.高级语言就是机器语言 B.汇编语言程序、高级语言程序都是计算机程序,但只有机器语言程序才是计算机可以直接识别并执行的程序 C.C语言因为具有汇编语言的一些特性,所以是汇编语言的一种 D.C源程序经过编译、连接,若正确,执行后就能得到正确的运行结果6.用C语言编写的源程序经过编译后,若没有产生编译错误,则系统将()。 A.生成可执行文件B.生成目标文件 C.输出运行结果D.自动保存源文件 7.下列叙述中不正确的是()。 A.main函数在C程序中必须有且只有一个 B. C程序的执行从main函数开始,所以main函数必须放在程序最前面 C. 函数可以带参数,也可以不带参数。机械设计基础试题答案[1]
机电一体化期末总复习试题含答案
实用综合教程(第二版)课后练习答案
机械设计基础课后习题答案全
机电一体化技术—考试题库及答案
机械设计基础试题一参考答案
机电一体化复习题(附答案)
机械设计基础习题与答案
机械设计基础典型试题1-2(附答案)
机电一体化系统设计试题及答案
全新版大学英语综合教程第二版课后练习答案定稿版
机械设计基础试题及答案1
机电一体化试卷及答案
C语言程序设计第二版习题参考答案
机械设计基础习题答案
机械设计基础(第三版)课后答案(1-18章全)
机电一体化期末考试试题及答案
C语言程序设计第二版习题参考答案