完整word版,各种聚类算法介绍及对比
一、层次聚类
1、层次聚类的原理及分类
1)层次法(Hierarchical methods)先计算样本之间的距离。每次将距离最近的点合并到同一个类。然后,再计算类与类之间的距离,将距离最近的类合并为一个大类。不停的合并,直到合成了一个类。其中类与类的距离的计算方法有:最短距离法,最长距离法,中间距离法,类平均法等。比如最短距离法,将类与类的距离定义为类与类之间样本的最短距离。
层次聚类算法根据层次分解的顺序分为:自下底向上和自上向下,即凝聚的层次聚类算法和分裂的层次聚类算法(agglomerative和divisive),也可以理解为自下而上法(bottom-up)和自上而下法(top-down)。自下而上法就是一开始每个个体(object)都是一个
类,然后根据linkage寻找同类,最后形成一个“类”。自上而下法就是反过来,一开始所有个体都属于一个“类”,然后根据linkage排除异己,最后每个个体都成为一个“类”。这两种路方法没有孰优孰劣之分,只是在实际应用的时候要根据数据特点以及你想要的“类”的个数,来考虑是自上而下更快还是自下而上更快。至于根据Linkage判断“类”
的方法就是最短距离法、最长距离法、中间距离法、类平均法等等(其中类平均法往往被认为是最常用也最好用的方法,一方面因为其良好的单调性,另一方面因为其空间扩张/浓缩的程度适中)。为弥补分解与合并的不足,层次合并经常要与其它聚类方法相结合,如循环定位。
2)Hierarchical methods中比较新的算法有BIRCH(Balanced Iterative Reducing and Clustering Using Hierarchies利用层次方法的平衡迭代规约和聚类)主要是在数据量很大的时候使用,而且数据类型是numerical。首先利用树的结构对对象集进行划分,然后再利用其它聚类方法对这些聚类进行优化;ROCK(A Hierarchical Clustering Algorithm for Categorical Attributes)主要用在categorical的数据类型上;Chameleon(A Hierarchical Clustering Algorithm Using Dynamic Modeling)里用到的linkage是kNN(k-nearest-neighbor)算法,并以此构建一个graph,Chameleon的聚类效果被认为非常强大,比BIRCH好用,但运算复杂度很高,O(n^2)。
2、层次聚类的流程
凝聚型层次聚类的策略是先将每个对象作为一个簇,然后合并这些原子簇为越来越大的簇,直到所有对象都在一个簇中,或者某个终结条件被满足。绝大多数层次聚类属于凝聚型层次聚类,它们只是在簇间相似度的定义上有所不同。这里给出采用最小距离的凝聚层次聚类算法流程:
(1) 将每个对象看作一类,计算两两之间的最小距离;
(2) 将距离最小的两个类合并成一个新类;
(3) 重新计算新类与所有类之间的距离;
(4) 重复(2)、(3),直到所有类最后合并成一类。
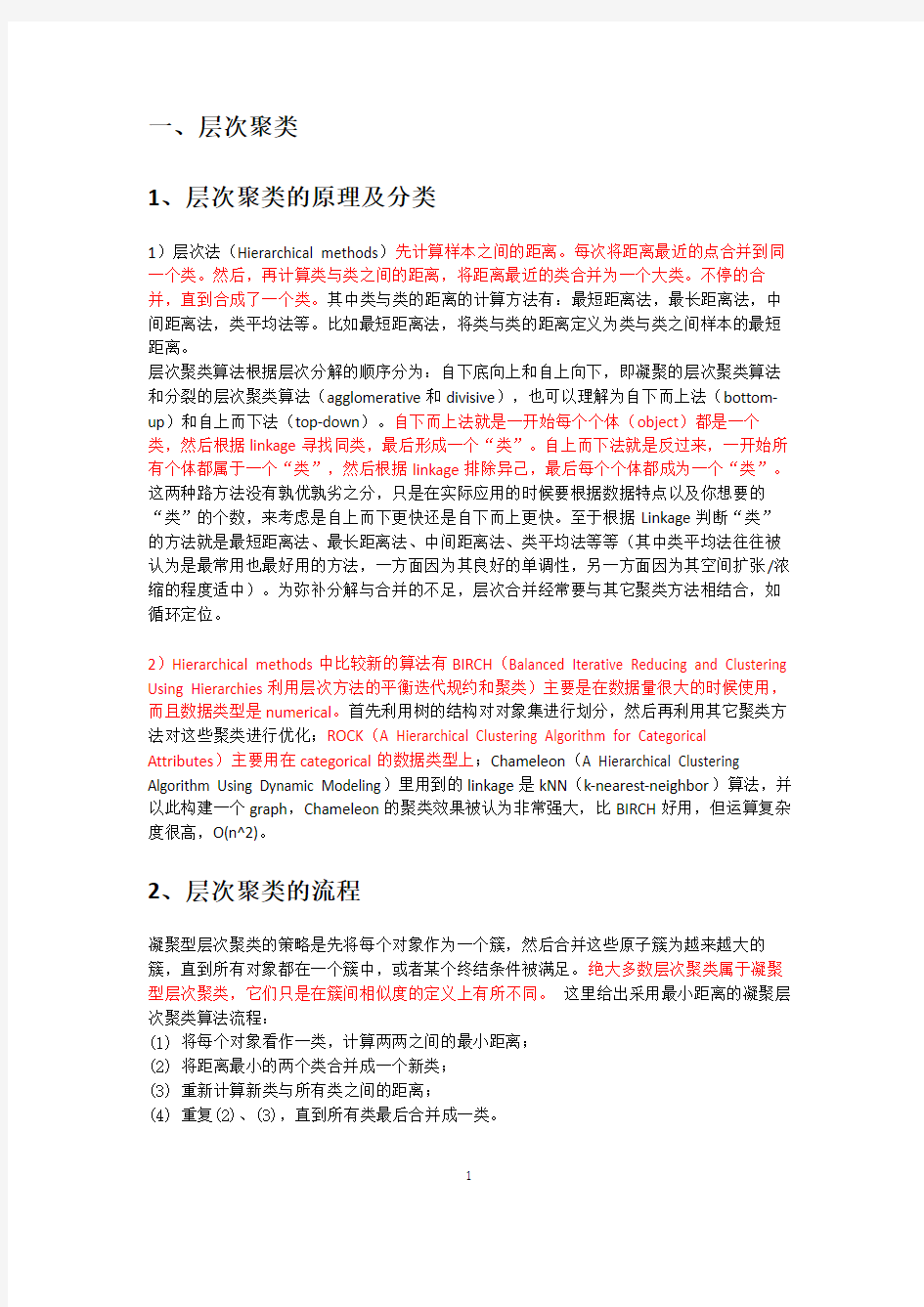
聚类的效果如下图,黑色是噪音点:
另外我们可以看出凝聚的层次聚类并没有类似基本K均值的全局目标函数,没有局部极小问题或是很难选择初始点的问题。合并的操作往往是最终的,一旦合并两个簇之后就不会撤销。当然其计算存储的代价是昂贵的。
3、层次聚类的优缺点
优点:1,距离和规则的相似度容易定义,限制少;2,不需要预先制定聚类数;3,可以发现类的层次关系;4,可以聚类成其它形状
缺点:1,计算复杂度太高;2,奇异值也能产生很大影响;3,算法很可能聚类成链状
r语言中使用hclust(d, method = "complete", members=NULL):进行层次聚类。d为距离矩阵;method表示类的合并方法,single最短距离法,complete最长距离法,median中间距离法,mcquitty 相似法,average 类平均法,centroid重心法,ward离差平方和法;members为NULL或d长度的矢量。
二、划分聚类法k-means
基于划分的方法(Partition-based methods):其原理简单来说就是,想象你有一堆散点需要聚类,想要的聚类效果就是“类内的点都足够近,类间的点都足够远”。首先你要确定这堆散点最后聚成几类,然后挑选几个点作为初始中心点,再然后依据预先定好的启发式算法(heuristic algorithms)给数据点做迭代重置(iterative relocation),直到最后到达“类内的点都足够近,类间的点都足够远”的目标效果。
Partition-based methods聚类多适用于中等体量的数据集,但我们也不知道“中等”到底有多“中”,所以不妨理解成,数据集越大,越有可能陷入局部最小。
1、Kmeans算法的原理
k-means算法以k为参数,把n个对象分成k个簇,使簇内具有较高的相似度,而簇间的相似度较低。k-means算法的处理过程如下:首先,随机地选择k个对象,每个对象初始地代表了一个簇的平均值或中心,即选择K个初始质心;对剩余的每个对象,根据其与各簇中心的距离,将它赋给最近的簇;然后重新计算每个簇的平均值。这个过程不断重复,直到准则函数收敛,直到质心不发生明显的变化。通常,采用平方误差准则,误差的平方和
SSE作为全局的目标函数,即最小化每个点到最近质心的欧几里得距离的平方和。此时,簇的质心就是该簇内所有数据点的平均值。
选择K个点作为初始质心
repeat
将每个点指派到最近的质心,形成K个簇
重新计算每个簇的质心
until 簇不发生变化或达到最大迭代次数
时间复杂度:O(tKmn),其中,t为迭代次数,K为簇的数目,m为记录数,n为维数
空间复杂度:O((m+K)n),其中,K为簇的数目,m为记录数,n为维数
K-Means 算法的详细过程
从上图中,我们可以看到,A, B, C, D, E 是五个在图中点。而灰色的点是我们的种子点,也就是我们用来找点群的点。有两个种子点,所以K=2。
然后,K-Means的算法如下:
①随机在图中取K(这里K=2)个种子点。
②然后对图中的所有点求到这K个种子点的距离,假如点Pi离种子点Si最近,那么Pi属于Si点群。(我们可以看到A,B属于上面的种子点,C,D,E属于下面中部的种子点)
③接下来,我们要移动种子点到属于他的“点群”的中心。(见图上的第三步)
④然后重复第2)和第3)步,直到,种子点没有移动(我们可以看到图中的第四步上面的种子点聚合了A,B,C,下面的种子点聚合了D,E)。
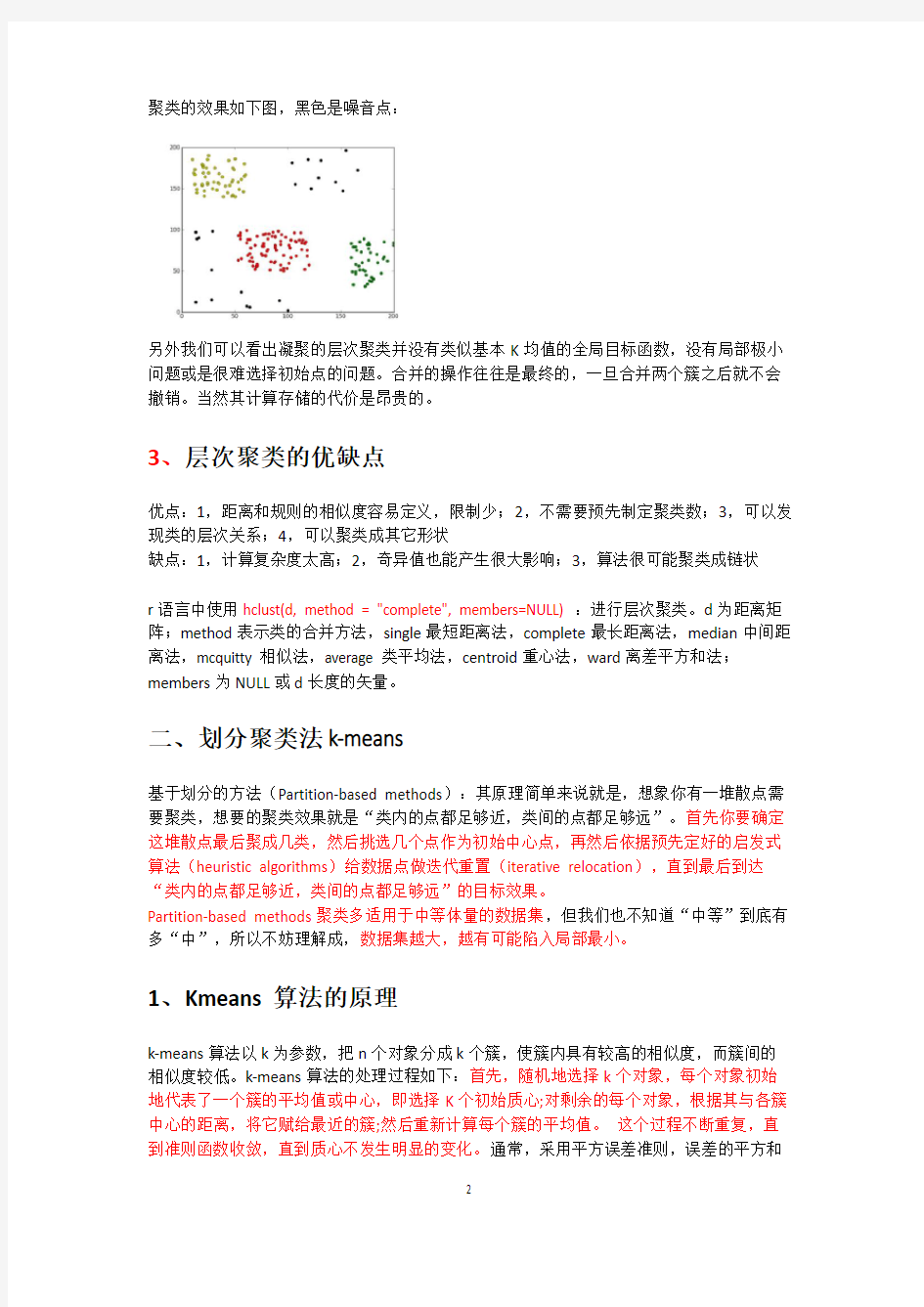
聚类的效果如下图,折线是历次循环时3个簇的质心的更新轨迹,黑点是初始质心:
我们查看基本K均值算法实现步骤及上面的聚类效果可以发现,该聚类算法将所有数据点都进行了指派,不识别噪音点。另外选择适当的初试质心是基本K均值过程的关键。
2、k均值的优缺点及分类
优点:1,简单,易于理解和实现;2,时间复杂度低
缺点:
1)kmeans要手工输入类数目,对初始值的设置很敏感;所以有了k-means++、intelligent k-means、genetic k-means;
2)k-means对噪声和离群值非常敏感,所以有了k-medoids和k-medians;
3)k-means只用于numerical类型数据,不适用于categorical类型数据,所以k-modes;4)k-means不能解决非凸(non-convex)数据,所以有了kernel k-means。
5)k-means主要发现圆形或者球形簇,不能识别非球形的簇。
3、k-means与DBSCAN的区别
k-means聚类算法的初始点选择不稳定,是随机选取的,这就引起聚类结果的不稳定。k-means属于动态聚类,往往聚出来的类有点圆形或者椭圆形。kmeans对于圆形区域聚类效果较好,dbscan基于密度,对于集中区域效果较好。对于不规则形状,kmeans完全无法用,dbscan可以起到很好的效果。
4、k-means注意问题
1)K如何确定
kmenas算法首先选择K个初始质心,其中K是用户指定的参数,即所期望的簇的个数。这样做的前提是我们已经知道数据集中包含多少个簇,但很多情况下,我们并不知道数据的分布情况,实际上聚类就是我们发现数据分布的一种手段。如何有效的确定K值,这里大致提供几种方法:
①与层次聚类结合[2]
经常会产生较好的聚类结果的一个有趣策略是,首先采用层次凝聚算法决定结果粗的数目,并找到一个初始聚类,然后用迭代重定位来改进该聚类。
②稳定性方法[3]
稳定性方法对一个数据集进行2次重采样产生2个数据子集,再用相同的聚类算法对2个数据子集进行聚类,产生2个具有k个聚类的聚类结果,计算2个聚类结果的相似度的分布情况。2个聚类结果具有高的相似度说明k个聚类反映了稳定的聚类结构,其相似度可以用来估计聚类个数。采用次方法试探多个k,找到合适的k值。
③系统演化方法[3]
系统演化方法将一个数据集视为伪热力学系统,当数据集被划分为K个聚类时称系统处于状态K。系统由初始状态K=1出发,经过分裂过程和合并过程,系统将演化到它的稳定平衡状态Ki,所对应的聚类结构决定了最优类数Ki。系统演化方法能提供关于所有聚类之间的相对边界距离或可分程度,适用于明显分离的聚类结构和轻微重叠的聚类结构。
④使用canopy算法进行初始划分[4]
基于Canopy Method的聚类算法将聚类过程分为两个阶段
Stage1、聚类最耗费计算的地方是计算对象相似性的时候,Canopy Method在第一阶段选择简单、计算代价较低的方法计算对象相似性,将相似的对象放在一个子集中,这个子集被叫做Canopy ,通过一系列计算得到若干Canopy,Canopy之间可以是重叠的,但不会存在某个对象不属于任何Canopy的情况,可以把这一阶段看做数据预处理;
Stage2、在各个Canopy 内使用传统的聚类方法(如K-means),不属于同一Canopy 的对象之间不进行相似性计算。
从这个方法起码可以看出两点好处:首先,Canopy 不要太大且Canopy 之间重叠的不要太多的话会大大减少后续需要计算相似性的对象的个数;其次,类似于K-means这样的聚类方法是需要人为指出K的值的,通过Stage1得到的Canopy 个数完全可以作为这个K值,一定程度上减少了选择K的盲目性。
其他方法如贝叶斯信息准则方法(BIC)可参看文献[5]。
2)初始质心的选取
选择适当的初始质心是基本kmeans算法的关键步骤。常见的方法是随机的选取初始质心,但是这样簇的质量常常很差。处理选取初始质心问题的一种常用技术是:多次运行,每次使用一组不同的随机初始质心,然后选取具有最小SSE(误差的平方和)的簇集。这种策略简单,但是效果可能不好,这取决于数据集和寻找的簇的个数。
第二种有效的方法是,取一个样本,并使用层次聚类技术对它聚类。从层次聚类中提取K个簇,并用这些簇的质心作为初始质心。该方法通常很有效,但仅对下列情况有效:(1)样本相对较小,例如数百到数千(层次聚类开销较大);(2)K相对于样本大小较小
第三种选择初始质心的方法,随机地选择第一个点,或取所有点的质心作为第一个点。然后,对于每个后继初始质心,选择离已经选取过的初始质心最远的点。使用这种方法,确保了选择的初始质心不仅是随机的,而且是散开的。但是,这种方法可能选中离群点。此外,求离当前初始质心集最远的点开销也非常大。为了克服这个问题,通常该方法用于点样本。由于离群点很少(多了就不是离群点了),它们多半不会在随机样本中出现。计算量也大幅减少。
第四种方法就是上面提到的canopy算法。
3)距离的度量
常用的距离度量方法包括:欧几里得距离和余弦相似度。两者都是评定个体间差异的大小的。欧几里得距离度量会受指标不同单位刻度的影响,所以一般需要先进行标准化,同时距离越大,个体间差异越大;空间向量余弦夹角的相似度度量不会受指标刻度的影响,余弦值落于区间[-1,1],值越大,差异越小。但是针对具体应用,什么情况下使用欧氏距离,什么情况下使用余弦相似度?
从几何意义上来说,n维向量空间的一条线段作为底边和原点组成的三角形,其顶角大小是不确定的。也就是说对于两条空间向量,即使两点距离一定,他们的夹角余弦值也可以随意变化。感性的认识,当两用户评分趋势一致时,但是评分值差距很大,余弦相似度倾向给出更优解。举个极端的例子,两用户只对两件商品评分,向量分别为(3,3)和(5,5),这两位用户的认知其实是一样的,但是欧式距离给出的解显然没有余弦值合理。4)质心的计算
对于距离度量不管是采用欧式距离还是采用余弦相似度,簇的质心都是其均值,即向量各维取平均即可。
5)算法停止条件
一般是目标函数达到最优或者达到最大的迭代次数即可终止。对于不同的距离度量,目标函数往往不同。当采用欧式距离时,目标函数一般为最小化对象到其簇质心的距离的平方和。
当采用余弦相似度时,目标函数一般为最大化对象到其簇质心的余弦相似度和。6)空聚类的处理
如果所有的点在指派步骤都未分配到某个簇,就会得到空簇。如果这种情况发生,则需要某种策略来选择一个替补质心,否则的话,平方误差将会偏大。一种方法是选择一个距离当前任何质心最远的点。这将消除当前对总平方误差影响最大的点。另一种方
法是从具有最大SSE的簇中选择一个替补的质心。这将分裂簇并降低聚类的总SSE。如果有多个空簇,则该过程重复多次。另外,编程实现时,要注意空簇可能导致的程序bug。
三、基于密度的聚类
基于密度的方法(Density-based methods):k-means解决不了不规则形状的聚类。于是就有了Density-based methods来系统解决这个问题。该方法同时也对噪声数据的处理比较好。基于密度聚类的思想:思路就是定一个距离半径,最少有多少个点,然后把可以到达的点都连起来,判定为同类。其原理简单说画圈儿,其中要定义两个参数,一个是圈儿的最大半径,一个是一个圈儿里最少应容纳几个点。最后在一个圈里的,就是一个类。DBSCAN(Density-Based Spatial Clustering of Applications with Noise)就是其中的典型,可惜参数设置也是个问题,对这两个参数的设置非常敏感。DBSCAN的扩展叫OPTICS(Ordering Points To Identify Clustering Structure)通过优先对高密度(high density)进行搜索,然后根据高密度的特点设置参数,改善了DBSCAN的不足。
1、DBSCAN的概念
dbscan基于密度,对于集中区域效果较好,为了发现任意形状的簇,这类方法将簇看做是数据空间中被低密度区域分割开的稠密对象区域;一种基于高密度连通区域的基于密度的聚类方法,该算法将具有足够高密度的区域划分为簇,并在具有噪声的空间数据中发现任意形状的簇。
DBSCAN中的几个定义:
Ε邻域:给定对象半径为Ε内的区域称为该对象的Ε邻域;
核心对象:如果给定对象Ε领域内的样本点数大于等于MinPts,则称该对象为核心对象;直接密度可达:对于样本集合D,如果样本点q在p的Ε领域内,并且p为核心对象,那么对象q从对象p直接密度可达。
密度可达:对于样本集合D,给定一串样本点p1,p2….pn,p= p1,q= pn,假如对象pi从pi-1直接密度可达,那么对象q从对象p密度可达。注意:密度可达是单向的,密度可达即可容纳同一类。
密度相连:存在样本集合D中的一点o,如果对象o到对象p和对象q都是密度可达的,那么p和q密度相联。
密度可达是直接密度可达的传递闭包,并且这种关系是非对称的。密度相连是对称关系。DBSCAN目的是找到密度相连对象的最大集合。
有了以上的概念接下来就是算法描述了:DBSCAN通过检查数据库中每点的r邻域来搜索簇。如果点p的r邻域包含的点多于MinPts个,则创建一个以p为核心对象的新簇。然后,DBSCAN迭代的聚集从这些核心对象直接密度可达的对象,这个过程可能涉及一些密度可达簇的合并。当没有新的点可以添加到任何簇时,该过程结束。
例如:Eg: 假设半径Ε=3,MinPts=3,点p的E领域中有点{m,p,p1,p2,o}, 点m的E领域中有点{m,q,p,m1,m2},点q的E领域中有点{q,m},点o的E领域中有点{o,p,s},点s的E领域中有点{o,s,s1}.
那么核心对象有p,m,o,s(q不是核心对象,因为它对应的E领域中点数量等于2,小于MinPts=3);
点m从点p直接密度可达,因为m在p的E领域内,并且p为核心对象;
点q从点p密度可达,因为点q从点m直接密度可达,并且点m从点p直接密度可达;点q到点s密度相连,因为点q从点p密度可达,并且s从点p密度可达。
2、簇的生成原理及过程
1)DBSCAN聚类算法原理的基本要点:确定半径eps的值
①DBSCAN算法需要选择一种距离度量,对于待聚类的数据集中,任意两个点之间的距离,反映了点之间的密度,说明了点与点是否能够聚到同一类中。由于DBSCAN算法对高维数据定义密度很困难,所以对于二维空间中的点,可以使用欧几里德距离来进行度量。
②DBSCAN算法需要用户输入2个参数:一个参数是半径(Eps),表示以给定点P为中心的圆形邻域的范围;另一个参数是以点P为中心的邻域内最少点的数量(MinPts)。如果满足:以点P为中心、半径为Eps的邻域内的点的个数不少于MinPts,则称点P为核心点。
③DBSCAN聚类使用到一个k-距离的概念,k-距离是指:给定数据集P={p(i); i=0,1,…n},对于任意点P(i),计算点P(i)到集合D的子集S={p(1), p(2), …, p(i-1), p(i+1), …, p(n)}中所有点之间的距离,距离按照从小到大的顺序排序,假设排序后的距离集合为D={d(1), d(2), …, d(k-1), d(k), d(k+1), …,d(n)},则d(k)就被称为k-距离。也就是说,k-距离是点p(i)到所有点(除了p(i)点)之间距离第k近的距离。对待聚类集合中每个点p(i)都计算k-距离,最后得到所有点的k-距离集合E={e(1), e(2), …, e(n)}。
④根据经验计算半径Eps:根据得到的所有点的k-距离集合E,对集合E进行升序排序后得到k-距离集合E’,需要拟合一条排序后的E’集合中k-距离的变化曲线图,然后绘出曲线,通过观察,将急剧发生变化的位置所对应的k-距离的值,确定为半径Eps的值。
⑤根据经验计算最少点的数量MinPts:确定MinPts的大小,实际上也是确定k-距离中k的值,DBSCAN算法取k=4,则MinPts=4。
⑥另外,如果觉得经验值聚类的结果不满意,可以适当调整Eps和MinPts的值,经过多次迭代计算对比,选择最合适的参数值。可以看出,如果MinPts不变,Eps取得值过大,会导致大多数点都聚到同一个簇中,Eps过小,会导致一个簇的分裂;如果Eps不变,MinPts 的值取得过大,会导致同一个簇中点被标记为噪声点,MinPts过小,会导致发现大量的核心点。
我们需要知道的是,DBSCAN算法,需要输入2个参数,这两个参数的计算都来自经验知识。半径Eps的计算依赖于计算k-距离,DBSCAN取k=4,也就是设置MinPts=4,然后需要根据k-距离曲线,根据经验观察找到合适的半径Eps的值。
2)连通核心点生成簇
核心点能够连通(有些书籍中称为:“密度可达”),它们构成的以Eps长度为半径的圆形邻域相互连接或重叠,这些连通的核心点及其所处的邻域内的全部点构成一个簇。假设MinPts=4,则连通的核心点示例,如下图所示:
计算连通的核心点的思路是,基于广度遍历与深度遍历集合的方式:从核心点集合S中取出一个点p,计算点p与S集合中每个点(除了p点)是否连通,可能会得到一个连通核心点的集合C1,然后从集合S中删除点p和C1集合中的点,得到核心点集合S1;再从S1中取出一个点p1,计算p1与核心点集合S1集中每个点(除了p1点)是否连通,可能得到一个连通核心点集合C2,再从集合S1中删除点p1和C2集合中所有点,得到核心点集合S2,……最后得到p、p1、p2、……,以及C1、C2、……就构成一个簇的核心点。最终将核心点集合S中的点都遍历完成,得到所有的簇。
参数eps的设置,如果eps设置过大,则所有的点都会归为一个簇,如果设置过小,那么簇的数目会过多。如果MinPts设置过大的话,很多点将被视为噪声点。
3、根据数据点的密度分为三类点:
(1)核心点:该点在邻域内的密度超过给定的阀值MinPs。
(2)边界点:该点不是核心点,但是其邻域内包含至少一个核心点。
(3)噪音点:不是核心点,也不是边界点。
有了以上对数据点的划分,聚合可以这样进行:各个核心点与其邻域内的所有核心点放在同一个簇中,把边界点跟其邻域内的某个核心点放在同一个簇中。
聚类的效果如下图,黑色是噪音点:初识聚类算法:
因为DBSCAN使用簇的基于密度的定义,因此它是相对抗噪音的,并且能处理任意形状和大小的簇。但是如果簇的密度变化很大,例如ABCD四个簇,AB的密度大大大于CD,而且AB附近噪音的密度与簇CD的密度相当,这是当MinPs较大时,无法识别簇CD,簇CD和AB附近的噪音都被认为是噪音;当MinPs较小时,能识别簇CD,但AB跟其周围的噪音被识别为一个簇。这个问题可以基于共享最近邻(SNN)的聚类结局。
4、DBSCAN的优缺点:
优点:
1. 与K-means方法相比,DBSCAN不需要事先知道要形成的簇类的数量。
2. 与K-means方法相比,DBSCAN可以发现任意形状的簇类。
3. 同时,DBSCAN能够识别出噪声点。
4.DBSCAN对于数据库中样本的顺序不敏感,即Pattern的输入顺序对结果的影响不大。但是,对于处于簇类之间边界样本,可能会根据哪个簇类优先被探测到而其归属有所摆动。
缺点:
1. DBScan不能很好反映高尺寸数据。
2. DBScan不能很好反映数据集变化的密度。
3.对于高维数据,点之间极为稀疏,密度就很难定义了。
K - M e a n s 聚 类 算 法
基于K-means聚类算法的入侵检测系统的设计 基于K-means聚类算法的入侵检测系统的设计 今天给大家讲述的是K-means聚类算法在入侵检测系统中的应用首先,介绍一下 聚类算法 将认识对象进行分类是人类认识世界的一种重要方法,比如有关世界的时间进程的研究,就形成了历史学,有关世界空间地域的研究,则形成了地理学。 又如在生物学中,为了研究生物的演变,需要对生物进行分类,生物学家根据各种生物的特征,将它们归属于不同的界、门、纲、目、科、属、种之中。 事实上,分门别类地对事物进行研究,要远比在一个混杂多变的集合中更清晰、明了和细致,这是因为同一类事物会具有更多的近似特性。 通常,人们可以凭经验和专业知识来实现分类。而聚类分析(cluster analysis)作为一种定量方法,将从数据分析的角度,给出一个更准确、细致的分类工具。 (聚类分析我们说得朴实一点叫做多元统计分析,说得时髦一点叫做数据挖掘算法,因为这个算法可以在一堆数据中获取很有用的信息,这就不就是数据挖掘吗,所以大家平时也不要被那些高大上的名词给吓到了,它背后的核心原理大多数我们都是可以略懂一二的,再
比如说现在AI这么火,如果大家还有印象的话,以前我们在大二上学习概率论的时候,我也和大家分享过自然语言处理的数学原理,就是如何让机器人理解我们人类的自然语言,比如说,苹果手机上的Siri系统,当时还让杨帆同学帮我在黑板上写了三句话,其实就是贝叶斯公式+隐含马尔可夫链。估计大家不记得了,扯得有点远了接下来还是回归我们的正题,今天要讨论的聚类算法。) K-Means是常用的聚类算法,与其他聚类算法相比,其时间复杂度低,结果稳定,聚类的效果也还不错, 相异度计算 在正式讨论聚类前,我们要先弄清楚一个问题:如何定量计算两个可比较元素间的相异度。用通俗的话说,相异度就是两个东西差别有多大,例如人类与章鱼的相异度明显大于人类与黑猩猩的相异度,这是能我们直观感受到的。但是,计算机没有这种直观感受能力,我们必须对相异度在数学上进行定量定义。 要用数量化的方法对事物进行分类,就必须用数量化的方法描述事物之间的相似程度。一个事物常常需要用多个特征变量来刻画,就比如说我们举一个例证,就有一项比较神奇的技术叫面部识别技术,其实听起来很高大上,它是如何做到的,提取一个人的面部特征,比如说嘴巴的长度,鼻梁的高度,眼睛中心到鼻子的距离,鼻子到嘴巴的距离,这些指标对应得数值可以组成一个向量作为每一个个体的一个标度变量(),或者说叫做每一个人的一个特征向量。 如果对于一群有待分类的样本点需用p 个特征变量值描述,则每
卡尔曼滤波算法总结
Kalman_Filter(float Gyro,float Accel) { Angle+=(Gyro - Q_bias) * dt; Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; Pdot[1]= - PP[1][1]; Pdot[2]= - PP[1][1]; Pdot[3]=Q_gyro; PP[0][0] += Pdot[0] * dt; PP[0][1] += Pdot[1] * dt; PP[1][0] += Pdot[2] * dt; PP[1][1] += Pdot[3] * dt; Angle_err = Accel - Angle; PCt_0 = C_0 * PP[0][0]; PCt_1 = C_0 * PP[1][0]; E = R_angle + C_0 * PCt_0; K_0 = PCt_0 / E; K_1 = PCt_1 / E; t_0 = PCt_0; t_1 = C_0 * PP[0][1]; PP[0][0] -= K_0 * t_0; PP[0][1] -= K_0 * t_1; PP[1][0] -= K_1 * t_0; PP[1][1] -= K_1 * t_1; Angle += K_0 * Angle_err; Q_bias += K_1 * Angle_err; Gyro_x = Gyro - Q_bias; } 首先是卡尔曼滤波的5个方程: -=--+(1)先验估计 X k k AX k k Bu k (|1)(1|1)() -=--+(2)协方差矩阵的预测(|1)(1|1)' P k k AP k k A Q
各种聚类算法及改进算法的研究
论文关键词:数据挖掘;聚类算法;聚类分析论文摘要:该文详细阐述了数据挖掘领域的常用聚类算法及改进算法,并比较分析了其优缺点,提出了数据挖掘对聚类的典型要求,指出各自的特点,以便于人们更快、更容易地选择一种聚类算法解决特定问题和对聚类算法作进一步的研究。并给出了相应的算法评价标准、改进建议和聚类分析研究的热点、难点。上述工作将为聚类分析和数据挖掘等研究提供有益的参考。 1 引言随着经济社会和科学技术的高速发展,各行各业积累的数据量急剧增长,如何从海量的数据中提取有用的信息成为当务之急。聚类是将数据划分成群组的过程,即把数据对象分成多个类或簇,在同一个簇中的对象之间具有较高的相似度,而不同簇中的对象差别较大。它对未知数据的划分和分析起着非常有效的作用。通过聚类,能够识别密集和稀疏的区域,发现全局的分布模式,以及数据属性之间的相互关系等。为了找到效率高、通用性强的聚类方法人们从不同角度提出了许多种聚类算法,一般可分为基于层次的,基于划分的,基于密度的,基于网格的和基于模型的五大类。 2 数据挖掘对聚类算法的要求(1)可兼容性:要求聚类算法能够适应并处理属性不同类型的数据。(2)可伸缩性:要求聚类算法对大型数据集和小数据集都适用。(3)对用户专业知识要求最小化。(4)对数据类别簇的包容性:即聚类算法不仅能在用基本几何形式表达的数据上运行得很好,还要在以其他更高维度形式表现的数据上同样也能实现。(5)能有效识别并处理数据库的大量数据中普遍包含的异常值,空缺值或错误的不符合现实的数据。(6)聚类结果既要满足特定约束条件,又要具有良好聚类特性,且不丢失数据的真实信息。(7)可读性和可视性:能利用各种属性如颜色等以直观形式向用户显示数据挖掘的结果。(8)处理噪声数据的能力。(9)算法能否与输入顺序无关。 3 各种聚类算法介绍随着人们对数据挖掘的深入研究和了解,各种聚类算法的改进算法也相继提出,很多新算法在前人提出的算法中做了某些方面的提高和改进,且很多算法是有针对性地为特定的领域而设计。某些算法可能对某类数据在可行性、效率、精度或简单性上具有一定的优越性,但对其它类型的数据或在其他领域应用中则不一定还有优势。所以,我们必须清楚地了解各种算法的优缺点和应用范围,根据实际问题选择合适的算法。 3.1 基于层次的聚类算法基于层次的聚类算法对给定数据对象进行层次上的分解,可分为凝聚算法和分裂算法。 (1)自底向上的凝聚聚类方法。这种策略是以数据对象作为原子类,然后将这些原子类进行聚合。逐步聚合成越来越大的类,直到满足终止条件。凝聚算法的过程为:在初始时,每一个成员都组成一个单独的簇,在以后的迭代过程中,再把那些相互邻近的簇合并成一个簇,直到所有的成员组成一个簇为止。其时间和空间复杂性均为O(n2)。通过凝聚式的方法将两簇合并后,无法再将其分离到之前的状态。在凝聚聚类时,选择合适的类的个数和画出原始数据的图像很重要。 [!--empirenews.page--] (2)自顶向下分裂聚类方法。与凝聚法相反,该法先将所有对象置于一个簇中,然后逐渐细分为越来越小的簇,直到每个对象自成一簇,或者达到了某个终结条件。其主要思想是将那些成员之间不是非常紧密的簇进行分裂。跟凝聚式方法的方向相反,从一个簇出发,一步一步细化。它的优点在于研究者可以把注意力集中在数据的结构上面。一般情况下不使用分裂型方法,因为在较高的层很难进行正确的拆分。 3.2 基于密度的聚类算法很多算法都使用距离来描述数据之间的相似性,但对于非凸数据集,只用距离来描述是不够的。此时可用密度来取代距离描述相似性,即基于密度的聚类算法。它不是基于各种各样的距离,所以能克服基于距离的算法只能发现“类圆形”的聚类的缺点。其指导思想是:只要一个区域中的点的密度(对象或数据点的数目)大过某个阈值,就把它加到与之相近的聚类中去。该法从数据对象的分布密度出发,把密度足够大的区域连接起来,从而可发现任意形状的簇,并可用来过滤“噪声”数据。常见算法有DBSCAN,DENCLUE 等。[1][2][3]下一页 3.3 基于划分的聚类算法给定一个N个对象的元组或数据库,根据给定要创建的划分的数目k,将数据划分为k个组,每个组表示一个簇类(<=N)时满足如下两点:(1)每个组至少包含一个对象;(2)每个对
CLOPE-快速有效的聚类算法
CLOPE:针对交易的数据快速有效聚类算法 摘要 本文研究分类数据的聚类问题,特别针对多维和大型的交易数据。从增加聚簇直方图的高宽比的方法得到启发,我们开发了一种新的算法---CLOPE,这是一种非常快速、可伸缩,同时又非常有效的算法。我们展示了算法对两个现实数据集聚类的性能,并将CLOPE与现有的聚类算法进行了比较。 关键词 数据挖掘,聚类,分类数据,可伸缩性 1.简介 聚类是一种非常重要的数据挖掘技术,它的目的是将相似的交易[12, 14, 4, 1]分组在一起。最近,越来越多的注意力已经放到了分类数据[10,8,6,5,7,13]的聚类上,分类数据是由非数值项构成的数据。交易数据,例如购物篮数据和网络日志数据,可以被认为是一种特殊的拥有布尔型值的分类数据,它们将所有可能的项作为项。快速而精确地对交易数据进行聚类的技术在零售行业,电子商务智能化等方面有着很大的应用潜力。 但是,快速而有效聚类交易数据是非常困难的,因为这类的数据通常有着高维,稀疏和大容量的特征。基于距离的算法例如k-means[11]和CLARANS[12]都是对低维的数值型数据有效。但是对于高维分类数据的处理效果却通常不那么令人满意[7]。像ROCK这类的分层聚类算法在分类数据聚类中表现的非常有效,但是他们在处理大型数据库时表现出先天的无效。 LargeItem[13]算法通过迭代优化一个全局评估函数对分类数据进行聚类。这个评估函数是基于大项概念的,大项是在一个聚簇内出现概率比一个用户自定义的参数——最小支持度大的项。计算全局评估函数要远比计算局部评估函数快得多,局部评估函数是根据成对相似性定义的。这种全局方法使得LargeItem算法非常适合于聚类大型的分类数据库。 在这篇文章中,我们提出了一种新的全局评估函数,它试图通过增加聚簇直方图的高度与宽度之比来增加交易项在聚簇内的重叠性。此外,我们通过引用一个参数来控制聚簇紧密性的方法来泛化我们的想法,通过修改这个参数可以得到
K-means文本聚类算法
最大距离法选取初始簇中心的K-means文本聚类算法的研究 的评论 背景 随着计算机技术和网络技术的飞速发展,人们的生活方式产生了极大的改变。计算机从一个有几个房子大小的巨无霸,已经变成了小巧的笔记本。网络设备也已经从PC端走向移动端。越来越丰富的网络设备,让人们能在网络里畅游,网络对于人们来说触手可及,同时也产生了巨大的数据流量。人们如何从海量的数据中找到有用的信息,成为了现在计算机学科的研究热点。聚类是数据挖掘中重要的一支。由于聚类具有无需先验知识的优势,可以根据数据自然分部而获取知识。聚类成为数据挖掘领域一个非常活跃的领域,而且得到了广泛的应用。聚类就是把一个数据集合分成几个簇,在同一个簇里,数据相关性最高,但是在2个不同的簇里,数据相关性最低。K-means聚类算法主要针对处理大数据集时,处理快速简单,并且算法具有高效性和可伸缩性。但是,K-means聚类算法随机的选择初始簇中心会导致以下缺点:(1)得到的聚类结果中容易出现局部最优,而不是全局最优;(2)聚类结果不具有稳定性,很大程度上依赖于初始簇中心;(3)聚类过程中的迭代次数增加使聚类过程中的总耗时增加。 传统的k-means聚类算法 传统的聚类算法思想:首先从N个数据对象集合中随机选择k个对象,然后计算剩余的N-k个对象与k个对象的距离(相似度),与k个对象中哪个对象的距离最小,就把分给那个对象;然后在计算每个簇中的簇中心,即是每个簇中对象的均值;不断重复这一过程步骤,直到标准测度函数E开始收敛为止。 K-means算法描述如下: 输入:迭代终止条件ε,最大的迭代次数为max,簇的总数目是k,样本集有N个数据对象。 输出:满足迭代终止条件的k个簇和迭代次数s。 随机初始化k个簇中心: 对每个数据对象,分别计算该对象与k个簇中心均值的距离,并选择距离最小的簇将该对象加个到该簇里; 重新计算k个簇的中心,利用函数E计算出此时的函数值; 如果带到最大迭代次数或满足:
数据挖掘中的聚类分析方法
计算机工程应用技术本栏目责任编辑:贾薇薇 数据挖掘中的聚类分析方法 黄利文 (泉州师范学院理工学院,福建泉州362000) 摘要:聚类分析是多元统计分析的重要方法之一,该方法在许多领域都有广泛的应用。本文首先对聚类的分类做简要的介绍,然后给出了常用的聚类分析方法的基本思想和优缺点,并对常用的聚类方法作比较分析,以便人们根据实际的问题选择合适的聚类方法。 关键词:聚类分析;数据挖掘 中图分类号:TP311文献标识码:A文章编号:1009-3044(2008)12-20564-02 ClusterAnlaysisMethodsofDataMining HUANGLi-wen (SchoolofScience,QuanzhouNormalUniversity,Quanzhou362000,China) Abstract:Clusteranalysisisoneoftheimportantmethodsofmultivariatestatisticalanalysis,andthismethodhasawiderangeofapplica-tionsinmanyfields.Inthispaper,theclassificationoftheclusterisintroducedbriefly,andthengivessomecommonmethodsofclusteranalysisandtheadvantagesanddisadvantagesofthesemethods,andtheseclusteringmethodwerecomparedandanslyzedsothatpeoplecanchosesuitableclusteringmethodsaccordingtotheactualissues. Keywords:ClusterAnalysis;DataMining 1引言 聚类分析是数据挖掘中的重要方法之一,它把一个没有类别标记的样本集按某种准则划分成若干个子类,使相似的样品尽可能归为一类,而不相似的样品尽量划分到不同的类中。目前,该方法已经被广泛地应用于生物、气候学、经济学和遥感等许多领域,其目的在于区别不同事物并认识事物间的相似性。因此,聚类分析的研究具有重要的意义。 本文主要介绍常用的一些聚类方法,并从聚类的可伸缩性、类的形状识别、抗“噪声”能力、处理高维能力和算法效率五个方面对其进行比较分析,以便人们根据实际的问题选择合适的聚类方法。 2聚类的分类 聚类分析给人们提供了丰富多彩的分类方法,这些方法大致可归纳为以下几种[1,2,3,4]:划分方法、层次方法、基于密度的聚类方法、基于网格的聚类方法和基于模型的聚类方法。 2.1划分法(partitiongingmethods) 给定一个含有n个对象(或元组)的数据库,采用一个划分方法构建数据的k个划分,每个划分表示一个聚簇,且k≤n。在聚类的过程中,需预先给定划分的数目k,并初始化k个划分,然后采用迭代的方法进行改进划分,使得在同一类中的对象之间尽可能地相似,而不同类的中的对象之间尽可能地相异。这种聚类方法适用于中小数据集,对大规模的数据集进行聚类时需要作进一步的改进。 2.2层次法(hietarchicalmethods) 层次法对给定数据对象集合按层次进行分解,分解的结果形成一颗以数据子集为节点的聚类树,它表明类与类之间的相互关系。根据层次分解是自低向上还是自顶向下,可分为凝聚聚类法和分解聚类法:凝聚聚类法的主要思想是将每个对象作为一个单独的一个类,然后相继地合并相近的对象和类,直到所有的类合并为一个,或者符合预先给定的终止条件;分裂聚类法的主要思想是将所有的对象置于一个簇中,在迭代的每一步中,一个簇被分裂为更小的簇,直到最终每个对象在单独的一个簇中,或者符合预先给定的终止条件。在层次聚类法中,当数据对象集很大,且划分的类别数较少时,其速度较快,但是,该方法常常有这样的缺点:一个步骤(合并或分裂)完成,它就不能被取消,也就是说,开始错分的对象,以后无法再改变,从而使错分的对象不断增加,影响聚类的精度,此外,其抗“噪声”的能力也较弱,但是若把层次聚类和其他的聚类技术集成,形成多阶段聚类,聚类的效果有很大的提高。2.3基于密度的方法(density-basedmethods) 该方法的主要思想是只要临近区域的密度(对象或数据点的数目)超过某个阈值,就继续聚类。也就是说,对于给定的每个数据点,在一个给定范围的区域中必须至少包含某个数目的点。这样的方法就可以用来滤处"噪声"孤立点数据,发现任意形状的簇。2.4基于网格的方法(grid-basedmethods) 这种方法是把对象空间量化为有限数目的单元,形成一个网格结构。所有的聚类操作都在这个网格结构上进行。用这种方法进行聚类处理速度很快,其处理时间独立于数据对象的数目,只与量化空间中每一维的单元数目有关。 2.5基于模型的方法(model-basedmethod) 基于模型的方法为每个簇假定一个模型,寻找数据对给定模型的最佳拟合。该方法经常基于这样的假设:数据是根据潜在的概 收稿日期:2008-02-17 作者简介:黄利文(1979-),男,助教。
(完整word版)各种聚类算法介绍及对比
一、层次聚类 1、层次聚类的原理及分类 1)层次法(Hierarchical methods)先计算样本之间的距离。每次将距离最近的点合并到同一个类。然后,再计算类与类之间的距离,将距离最近的类合并为一个大类。不停的合并,直到合成了一个类。其中类与类的距离的计算方法有:最短距离法,最长距离法,中间距离法,类平均法等。比如最短距离法,将类与类的距离定义为类与类之间样本的最短距离。 层次聚类算法根据层次分解的顺序分为:自下底向上和自上向下,即凝聚的层次聚类算法和分裂的层次聚类算法(agglomerative和divisive),也可以理解为自下而上法(bottom-up)和自上而下法(top-down)。自下而上法就是一开始每个个体(object)都是一个 类,然后根据linkage寻找同类,最后形成一个“类”。自上而下法就是反过来,一开始所有个体都属于一个“类”,然后根据linkage排除异己,最后每个个体都成为一个“类”。这两种路方法没有孰优孰劣之分,只是在实际应用的时候要根据数据特点以及你想要的“类”的个数,来考虑是自上而下更快还是自下而上更快。至于根据Linkage判断“类” 的方法就是最短距离法、最长距离法、中间距离法、类平均法等等(其中类平均法往往被认为是最常用也最好用的方法,一方面因为其良好的单调性,另一方面因为其空间扩张/浓缩的程度适中)。为弥补分解与合并的不足,层次合并经常要与其它聚类方法相结合,如循环定位。 2)Hierarchical methods中比较新的算法有BIRCH(Balanced Iterative Reducing and Clustering Using Hierarchies利用层次方法的平衡迭代规约和聚类)主要是在数据量很大的时候使用,而且数据类型是numerical。首先利用树的结构对对象集进行划分,然后再利用其它聚类方法对这些聚类进行优化;ROCK(A Hierarchical Clustering Algorithm for Categorical Attributes)主要用在categorical的数据类型上;Chameleon(A Hierarchical Clustering Algorithm Using Dynamic Modeling)里用到的linkage是kNN(k-nearest-neighbor)算法,并以此构建一个graph,Chameleon的聚类效果被认为非常强大,比BIRCH好用,但运算复杂度很高,O(n^2)。 2、层次聚类的流程 凝聚型层次聚类的策略是先将每个对象作为一个簇,然后合并这些原子簇为越来越大的簇,直到所有对象都在一个簇中,或者某个终结条件被满足。绝大多数层次聚类属于凝聚型层次聚类,它们只是在簇间相似度的定义上有所不同。这里给出采用最小距离的凝聚层次聚类算法流程: (1) 将每个对象看作一类,计算两两之间的最小距离; (2) 将距离最小的两个类合并成一个新类; (3) 重新计算新类与所有类之间的距离; (4) 重复(2)、(3),直到所有类最后合并成一类。
卡尔曼滤波算法(C--C++两种实现代码)
卡尔曼滤波算法实现代码 C++实现代码如下: ============================kalman.h================= =============== // kalman.h: interface for the kalman class. // ////////////////////////////////////////////////////////////////////// #if !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__IN CLUDED_) #define AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__INCLU DED_ #if _MSC_VER > 1000 #pragma once #endif// _MSC_VER > 1000 #include
kalman(int x=0,int xv=0,int y=0,int yv=0); //virtual ~kalman(); }; #endif// !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C 0__INCLUDED_) ============================kalman.cpp=============== ================= #include "kalman.h" #include
(完整版)聚类算法总结
1.聚类定义 “聚类是把相似的对象通过静态分类的方法分成不同的组别或者更多的子集(subset),这样让在同一个子集中的成员对象都有一些相似的属性”——wikipedia “聚类分析指将物理或抽象对象的集合分组成为由类似的对象组成的多个类的分析过程。它是一种重要的人类行为。聚类是将数据分类到不同的类或者簇这样的一个过程,所以同一个簇中的对象有很大的相似性,而不同簇间的对象有很大的相异性。”——百度百科 说白了,聚类(clustering)是完全可以按字面意思来理解的——将相同、相似、相近、相关的对象实例聚成一类的过程。简单理解,如果一个数据集合包含N个实例,根据某种准则可以将这N 个实例划分为m个类别,每个类别中的实例都是相关的,而不同类别之间是区别的也就是不相关的,这个过程就叫聚类了。 2.聚类过程: 1) 数据准备:包括特征标准化和降维. 2) 特征选择:从最初的特征中选择最有效的特征,并将其存储于向量中. 3) 特征提取:通过对所选择的特征进行转换形成新的突出特征.
4) 聚类(或分组):首先选择合适特征类型的某种距离函数(或构造新的距离函数)进行接近程度的度量;而后执行聚类或分组. 5) 聚类结果评估:是指对聚类结果进行评估.评估主要有3 种:外部有效性评估、内部有效性评估和相关性测试评估. 3聚类算法的类别 没有任何一种聚类技术(聚类算法)可以普遍适用于揭示各种多维数据集所呈现出来的多种多样的结构,根据数据在聚类中的积聚规则以及应用这些规则的方法,有多种聚类算法.聚类算法有多种分类方法将聚类算法大致分成层次化聚类算法、划分式聚类算法、基于密度和网格的聚类算法和其他聚类算法,如图1 所示 的4 个类别.
卡尔曼滤波简介及其算法实现代码
卡尔曼滤波简介及其算法实现代码 卡尔曼滤波算法实现代码(C,C++分别实现) 卡尔曼滤波器简介 近来发现有些问题很多人都很感兴趣。所以在这里希望能尽自己能力跟大家讨论一些力所能及的算法。现在先讨论一下卡尔曼滤波器,如果时间和能力允许,我还希望能够写写其他的算法,例如遗传算法,傅立叶变换,数字滤波,神经网络,图像处理等等。 因为这里不能写复杂的数学公式,所以也只能形象的描述。希望如果哪位是这方面的专家,欢迎讨论更正。 卡尔曼滤波器– Kalman Filter 1.什么是卡尔曼滤波器 (What is the Kalman Filter?) 在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比亚大学获得博士学位。我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。如果对这编论文有兴趣,可以到这里的地址下载: https://www.docsj.com/doc/cd12463043.html,/~welch/media/pdf/Kalman1960.pdf。 简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 2.卡尔曼滤波器的介绍 (Introduction to the Kalman Filter) 为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。 在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就
基于k—means聚类算法的试卷成绩分析研究
基于k—means聚类算法的试卷成绩分析研 究 第39卷第4期 2009年7月 河南大学(自然科学版) JournalofHenanUniversity(NaturalScience) V o1.39NO.4 Ju1.2009 基于k—means聚类算法的试卷成绩分析研究 谭庆' (洛阳师范学院信息技术学院,河南洛阳471022) 摘要:研究_rk-means聚类算法,并将此算法应用于高校学生试卷成绩分析中.首先对数据进行了预处理,然后 使用k-means算法,对学生试卷成绩进行分类评价.用所获得的结果指导学生的学习和今后的教学工作. 关键词:数据挖掘;聚类;k-means算法;试卷成绩 中圈分类号:TP311文献标志码:A文章编号:1003—4978(2009)04—0412—04 AnalysisandResearchofGradesofExaminationPaper BasedonK—meansClusteringAlgorithm TANQing (Acaderny.l,InformationTechnologY,LuoyangNormalUniversity,LuoyangHenan47102 2,China) Abstract:Thispaperresearcheslhekmeansclusteringalgorithmandappliesittotheanalysiso fthegradedataof examinationpaperofhighereducationschoolSstudents.Firstly,itpreprocessesthedatabefor eminingThen,it usesthek—
Kalman滤波算法
Kalman 滤波算法 姓名:刘金强 专业:控制理论与控制工程 学号:2007255 ◆实验目的: (1)、掌握klman 滤波实现的原理和方法 (2)、掌握状态向量预测公式的实现过程 (3)、了解Riccati 差分方程实现的过程和新息的基本性质和过程的计算 ◆实验要求: 问题: F=[a1,a2,a3],其中a1=[1.0 0 0]的转置,a2=[0.3 1.0 0]的转置,a3=[0.1 0.2 0.4]的转置,x(0)=[3,-1,2]的转置;C=[b1,b2,b3],其中b1=[0.3 0.5]的转置,b2=[1,0.4]的转置,b3=[0.8 -0.7]的转置;V1(n)=[0 0 n1(n)sin(0.1n)]的转置,V2(n)=[n2(n) n3(n)];n1(n)为均值为零,方差为1的均匀分布白噪声;n2(n),n3(n)为均值为0,方差为0.1的均匀分布白噪声,n1(n),n2(n),n3(n)相互独立,试用卡尔曼滤波器算法估计x^(n). ◆实验原理: 初始条件: 1?(1)x =E{x(1)} K(1,0)=E{[x(1)- (1)x ][x(1)- (1)H x ]},其中(1)x =E{x(1)} 输入观测向量过程: 观测向量序列={y(1),…………y(n)} 已知参数: 状态转移矩阵F(n+1,n) 观测矩阵C(n) 过程噪声向量的相关矩阵1()Q n 观测噪声向量的相关矩阵2()Q n 计算:n=1,2,3,………………. G(n)=F(n+1,n)K(n,n+1) ()H C n 12[()(,1)()()]H C n K n n C n Q n --+ Kalman 滤波器是一种线性的离散时间有限维系统。Kalman 滤波器的估计性能是:它使滤波后的状态估计误差的相关矩阵P(n)的迹最小化。这意味着,kalman 滤波器是状态向量x(n)的线性最小方差估计。 ◆实验结果: ◆程序代码: (1)主程序
一种基于密度的快速聚类算法
第37卷第11期 2000年11月计算机研究与发展JOU RNAL O F COM PU T ER R ESEA RCH &D EV ELO PM EN T V o l 137,N o 111N ov .2000 原稿收到日期:1999209220;修改稿收到日期:1999212209.本课题得到国家自然科学基金项目(项目编号69743001)和国家教委博士点教育基金的资助.周水庚,男,1966年生,博士研究生,高级工程师,主要从事数据库、数据仓库和数据挖掘以及信息检索等的研究.周傲英,男,1965年生,教授,博士生导师,主要从事数据库、数据挖掘和W eb 信息管理等研究.曹晶,女,1976年生,硕士研究生,主要从事数据库、数据挖掘等研究.胡运发,男,1940年生,教授,博士生导师,主要从事知识工程、数字图书馆、信息检索等研究. 一种基于密度的快速聚类算法 周水庚 周傲英 曹 晶 胡运发 (复旦大学计算机科学系 上海 200433) 摘 要 聚类是数据挖掘领域中的一个重要研究方向.聚类技术在统计数据分析、模式识别、图像处理等领域有广泛应用.迄今为止人们提出了许多用于大规模数据库的聚类算法.基于密度的聚类算法DBSCAN 就是一个典型代表.以DBSCAN 为基础,提出了一种基于密度的快速聚类算法.新算法以核心对象邻域中所有对象的代表对象为种子对象来扩展类,从而减少区域查询次数,降低I O 开销,实现快速聚类.对二维空间数据测试表明:快速算法能够有效地对大规模数据库进行聚类,速度上数倍于已有DBSCAN 算法. 关键词 空间数据库,数据挖掘,聚类,密度,快速算法,代表对象 中图法分类号 T P 311.13;T P 391 A FAST D ENSIT Y -BASED CL USTER ING AL G OR ITH M ZHOU Shu i 2Geng ,ZHOU A o 2Y ing ,CAO J ing ,and HU Yun 2Fa (D ep a rt m en t of Co mp u ter S cience ,F ud an U n iversity ,S hang ha i 200433) Abstract C lu stering is a p rom ising app licati on area fo r m any fields including data m in ing ,statistical data analysis ,p attern recogn iti on ,i m age p rocessing ,etc .In th is paper ,a fast den sity 2based clu stering algo rithm is developed ,w h ich con siderab ly speeds up the o riginal DB SCAN algo rithm .U n like DB SCAN ,the new DB SCAN u ses on ly a s m all num ber of rep resen tative ob jects in a co re ob ject’s neighbo rhood as seeds to exp and the clu ster so that the execu ti on frequency of regi on query can be decreased ,and con sequen tly the I O co st is reduced .Experi m en tal resu lts show that the new algo rithm is effective and efficien t in clu stering large 2scale databases ,and it is faster than the o riginal DB SCAN by several ti m es . Key words spatial database ,data m in ing ,clu stering ,den sity ,fast algo rithm ,rep resen tative ob jects 1 概 述 近10多年来,数据挖掘逐渐成为数据库研究领域的一个热点[1].其中,聚类分析就是广为研究的问题之一.所谓聚类,就是将数据库中的数据进行分组,使得每一组内的数据尽可能相似而不同组内的数据尽可能不同.聚类技术在统计数据分析、模式识别、图像处理等领域都有广泛的应用前景.迄今为止,人们已经提出了许多聚类算法[2~7].所有这些算法都试图解决大规模数据的聚类问题.以基于密度的聚类算法DB SCAN [4]为基础,本文提出一种基于密度的快速聚类算法.通过选用核心对象附近区域包含的所有对象的代表对象作为种子对象来扩展类,快速算法减少了区域查询的次数,从而减低了聚类时间和I O 开销 .本文内容安排如下:首先在第2节中介绍基于密度的聚类算法DB SCAN 的基本思想,并分析它的局限
基于向量空间模型的文本聚类算法
基于向量空间模型的文本聚类算法 转自:https://www.docsj.com/doc/cd12463043.html,/2009/0910/15270.php 1 文本聚类研究现状 Internet 已经发展为当今世界上最大的信息库和全球范围内传播信息最主要的渠道。随着Internet 的大规模普及和企业信息化程度的提高,各种资源呈爆炸式增长。在中国互联网络信息中心(CNNIC)2007 年1 月最新公布的中国互联网络发展状况统计报告中显示,70.2% 的网络信息均以文本形式体现。对于这种半结构或无结构化数据,如何从中获取特定内容的信息和知识成为摆在人们面前的一道难题。近年来,文本挖掘、信息过滤和信息检索等方面的研究出现了前所未有的高潮。 作为一种无监督的机器学习方法,聚类技术可以将大量文本信息组成少数有意义的簇,并提供导航或浏览机制。 文本聚类的主要应用点包括: (1) 文本聚类可以作为多文档自动文摘等自然语言处理应用的预处理步骤。其中比较典型的例子是哥伦比亚大学开发的多文档自动文摘系统Newsblaster[1] 。该系统将新闻进行 聚类处理,并对同主题文档进行冗余消除、信息融合、文本生成等处理,从而生成一篇简明扼要的摘要文档。 (2) 对搜索引擎返回的结果进行聚类,使用户迅速定位到所需要的信息。比较典型的系统有Infonetware Real Term Search 。Infonetware 具有强大的对搜索结果进行主题分类的功能。另外,由Carrot Search 开发的基于Java 的开源Carrot2 搜索结果聚合聚类引擎2.0 版也是这方面的利用,Carrot2 可以自动把自然的搜索结果归类( 聚合聚类) 到相应的语义类别中,提供基于层级的、同义的以及标签过滤的功能。 (3) 改善文本分类的结果,如俄亥俄州立大学的Y.C.Fang 等人的工作[2] 。 (4) 文档集合的自动整理。如Scatter/Gather[3] ,它是一个基于聚类的文档浏览系统。 2 文本聚类过程 文本聚类主要依据聚类假设:同类的文档相似度较大,非同类的文档相似度较小。作为一种无监督的机器学习方法,聚类由于不需要训练过程、以及不需要预先对文档手工标注类别,因此具有较高的灵活性和自动化处理能力,成为对文本信息进行有效组织、摘要和导航的重要手段。文本聚类的具体过程如图 1 所示。 图 1 文本聚类过程
各种聚类算法的比较
各种聚类算法的比较 聚类的目标是使同一类对象的相似度尽可能地小;不同类对象之间的相似度尽可能地大。目前聚类的方法很多,根据基本思想的不同,大致可以将聚类算法分为五大类:层次聚类算法、分割聚类算法、基于约束的聚类算法、机器学习中的聚类算法和用于高维度的聚类算法。摘自数据挖掘中的聚类分析研究综述这篇论文。 1、层次聚类算法 1.1聚合聚类 1.1.1相似度依据距离不同:Single-Link:最近距离、Complete-Link:最远距离、Average-Link:平均距离 1.1.2最具代表性算法 1)CURE算法 特点:固定数目有代表性的点共同代表类 优点:识别形状复杂,大小不一的聚类,过滤孤立点 2)ROCK算法 特点:对CURE算法的改进 优点:同上,并适用于类别属性的数据 3)CHAMELEON算法 特点:利用了动态建模技术 1.2分解聚类 1.3优缺点 优点:适用于任意形状和任意属性的数据集;灵活控制不同层次的聚类粒度,强聚类能力 缺点:大大延长了算法的执行时间,不能回溯处理 2、分割聚类算法 2.1基于密度的聚类 2.1.1特点 将密度足够大的相邻区域连接,能有效处理异常数据,主要用于对空间数据的聚类
1)DBSCAN:不断生长足够高密度的区域 2)DENCLUE:根据数据点在属性空间中的密度进行聚类,密度和网格与处理的结合 3)OPTICS、DBCLASD、CURD:均针对数据在空间中呈现的不同密度分不对DBSCAN作了改进 2.2基于网格的聚类 2.2.1特点 利用属性空间的多维网格数据结构,将空间划分为有限数目的单元以构成网格结构; 1)优点:处理时间与数据对象的数目无关,与数据的输入顺序无关,可以处理任意类型的数据 2)缺点:处理时间与每维空间所划分的单元数相关,一定程度上降低了聚类的质量和准确性 2.2.2典型算法 1)STING:基于网格多分辨率,将空间划分为方形单元,对应不同分辨率2)STING+:改进STING,用于处理动态进化的空间数据 3)CLIQUE:结合网格和密度聚类的思想,能处理大规模高维度数据4)WaveCluster:以信号处理思想为基础 2.3基于图论的聚类 2.3.1特点 转换为组合优化问题,并利用图论和相关启发式算法来解决,构造数据集的最小生成数,再逐步删除最长边 1)优点:不需要进行相似度的计算 2.3.2两个主要的应用形式 1)基于超图的划分 2)基于光谱的图划分 2.4基于平方误差的迭代重分配聚类 2.4.1思想 逐步对聚类结果进行优化、不断将目标数据集向各个聚类中心进行重新分配以获最优解
几种卡尔曼滤波算法理论
自适应卡尔曼滤波 卡尔曼滤波发散的原因 如果卡尔曼滤波是稳定的,随着滤波的推进,卡尔曼滤波估计的精度应该越来越高,滤波误差方差阵也应趋于稳定值或有界值。但在实际应用中,随着量测值数目的增加,由于估计误差的均值和估计误差协方差可能越来越大,使滤波逐渐失去准确估计的作用,这种现象称为卡尔曼滤波发散。 引起滤波器发散的主要原因有两点: (1)描述系统动力学特性的数学模型和噪声估计模型不准确,不能直接真实地反映物理过程,使得模型与获得的量测值不匹配而导致滤波发散。这种由于模型建立过于粗糙或失真所引起的发散称为滤波发散。 (2)由于卡尔曼滤波是递推过程,随着滤波步数的增加,舍入误差将逐渐积累。如果计算机字长不够长,这种积累误差很有可能使估计误差方差阵失去非负定性甚至失去对称性,使滤波增益矩阵逐渐失去合适的加权作用而导致发散。这种由于计算舍入误差所引起的发散称为计算发散。 针对上述卡尔曼滤波发散的原因,目前已经出现了几种有效抑制滤波发散的方法,常用的有衰减记忆滤波、限定记忆滤波、扩充状态滤波、有限下界滤波、平方根滤波、和自适应滤波等。这些方法本质上都是以牺牲滤波器的最优性为代价来抑制滤波发散,也就是说,多数都是次优滤波方法。 自适应滤波 在很多实际系统中,系统过程噪声方差矩阵Q和量测误差方差阵R事先是不知道的,有时甚至连状态转移矩阵 或量测矩阵H也不能确切建立。如果所建立的模型与实际模型不符可能回引起滤波发散。自适应滤波就是这样一种具有抑制滤波发散作用的滤波方法。在滤波过程中,自适应滤波一方面利用量测值修正预测值,同时也对未知的或不确切的系统模型参数和噪声统计参数进行估计修正。自适应滤波的方法很多,包括贝叶斯法、极大似然法、相关法与协方差匹配法,其中最基本也是最重要的是相关法,而相关法可分为输出相关法和新息相关法。 在这里只讨论系统模型参数已知,而噪声统计参数Q和R未知情况下的自适应滤波。由于Q和R等参数最终是通过增益矩阵K影响滤波值的,因此进行自适应滤波时,也可以不去估计Q和R等参数而直接根据量测数据调整K就可以了。