15.单脉冲天线
FPGA_可编程单脉冲发生器设计
8.3 可编程单脉冲发生器 可编程单脉冲发生器是一种脉冲宽度可编程的信号发生器,其输出为TTL 电平。在输入按键的控制下,产生单次的脉冲,脉冲的宽度由8位的输入数据控制(以下称之为脉宽参数)。由于是8位的脉宽参数,故可以产生255种宽度的单次脉冲。 在目标板上,I0~I7用作脉宽参数输入,PULSE_OUT用做可编程单脉冲输出,而KEY和/RB作为启动键和复位键。图3示出了可编程单脉冲发生器的电路图。 图3 可编程单脉冲发生器的电路图 8.3.1 由系统功能描述时序关系 可编程单脉冲发生器的操作过程是: (1) 预置脉宽参数。 (2) 按下复位键,初始化系统。 (3) 按下启动键,发出单脉冲。 以上三步可用三个按键来完成。但是,由于目标板已确定,故考虑在复位键按下后,经过延时自动产生预置脉宽参数的动作。这一过程可用图4的时序来描述。
图4 可编程单脉冲发生器的时序图 图中的/RB为系统复位脉冲,在其之后自动产生LOAD脉冲,装载脉宽参数N。之后,等待按下/KEY键。/KEY键按下后,单脉冲P_PULSE便输出。在此,应注意到:/KEY的按下是与系统时钟CLK不同步的,不加处理将会影响单脉冲P_PULSE的精度。为此,在/KEY按下期间,产生脉冲P1,它的上跳沿与时钟取得同步。之后,在脉宽参数的控制下,使计数单元开始计数。当达到预定时间后,再产生一个与时钟同步的脉冲P2。由P1和P2就可以算出单脉冲的宽度Tw。 8.3.2 流程图的设计 根据时序关系,可以做出图5所示的流程图。 在系统复位后,经一定的延时产生一个预置脉冲LOAD,用来预置脉宽参数。应该注意:复位脉冲不能用来同时预置,要在其之后再次产生一个脉冲来预置脉宽参数。 为了产生单次的脉冲,必须考虑到在按键KEY有效后,可能会保持较长的时间,也可能会产生多个尖脉冲。因此,需要设计一种功能,使得当检测到KE Y有效后就封锁KEY的再次输入,直到系统复位。这是本设计的一个关键所在。
单脉冲雷达
雷达大作业 单脉冲雷达在测角方面的应用 班级: 1302019 姓名: 指导教师:魏青
一、引言 1、背景 对目标的定向,是雷达的主要任务之一,单脉冲定向是雷达定向的一个重要方法。之所以叫“单脉冲”,是因为这种方法只需要一个目标回波脉冲,就可以给出目标角位置的全部信息。单脉冲技术由于其良好的测角、角跟踪性能和抗干扰能力,因此除了在跟踪雷达中应用之外,还广泛应用到各种武器平台的控制雷达当中。本文分析了标定方法确定天线方向图信息的理论有效性,给出利用标定结果进行宽带单脉冲测角的方法。 2、简介 宽带单脉冲雷达是将传统的单脉冲雷达加载宽带信号。在宽带信号观测下,目标可认为由一系列孤立的散射点组成。从而宽带单脉冲雷达测角实际上是测定一系列散射点的角度。宽带单脉冲雷达测角具有广泛的应用价值,除了标跟踪,还可以应用于三维成像。根据对宽带单脉冲测角的基本原理分析可知,天线方向图在测角中发挥了重要的作用,目前的文献在讨论宽带单脉冲测角时,通常都是采取与文献类似的方法: 根据理论模型,设定方向图函数。对于实际的宽带单脉冲雷达系统,方向图函数通常并不是严格的满足理论模型。此外,精确测量实际雷达系统的方向图际雷达系统进行标定来为测角提供必要的方向图信息。 二、单脉冲雷达的自动测角系统中的优势 1、角度跟踪精度 与圆锥扫描雷达相比,单脉冲雷达的角度跟踪精度要高得多。其主要原因有以下两点: 第一,圆锥扫描雷达至少要经过一个圆锥扫描周期后才能获得角误差信息,在此期间,目标振幅起伏噪声也叠加在圆锥扫描调制信号(角误差信号)上形成干扰,而自动增益控制电路的带宽又不能太宽,以免将频率为圆锥扫描频率的角误差信号也平滑掉,因而不能消除目标振幅起伏噪声的影响,在锥扫频率附近一定带宽内的振幅起伏噪声可以进入角跟踪系统,引起测角误差。而单脉冲雷达是在同一个脉冲内获得角误差信息,且自动增益控制电路的带宽可以较宽,故目标振幅起伏噪声的影响基本可以消除。 第二、圆锥扫描雷达的角误差信号以调制包络的形式出现,它的能量存在于上、下边频的两个频带内,而单脉冲雷达的角误差信息只存在于一个频带内。故圆锥扫描雷达接收机热噪声的影响比单脉冲雷达大一倍。单脉冲雷达的角跟踪精度比圆锥扫描雷达的要高一个量级,约为0.1-0.2密位。
单脉冲雷达理以及应用
单脉冲定向原理 对目标的定向,即测定目标的方向,是雷达的主要任务之一。单脉冲定向是雷达定向的一个重要方法。所谓“单脉冲”,是指使用这种方法时,只需要一个目标回波脉冲,就可以给出目标角位置的全部信息。根据从回波信号中提取目标角信息的特点,可以将单脉冲定向分为两种基本的方法:振幅定向法和相位定向法,分别见于下图。除了上述两种方法外,由它们合成的振幅—相位定向法(或称为综合法)也得到了广泛的应用。 图2-1 单脉冲振幅定向法 图2-2单脉冲相位定向法 2.1 振幅定向法 振幅定向法是用天线接收到的回波信号幅度值来进行角度测量的,该幅度值的变化规律取决于天线方向图以及天线的扫描方式。振幅定向法可以分为最大信号法和等信号法两大类,其中等信号法又可以分为比幅法和和差法。 如图所示,平面两波束相互部分交叠,其等强信号轴的方向已知,两波束中心轴与等强信号轴的偏角0θ也已知。假设目标回波信号来向与等强信号轴向的夹角为θ,天线波束方向图函数为F(θ),则两个子波束的方向图函数可分别写成 ()()()???-=+=θθθθθθ02 01)(F F F F (2-1) 两波束接收到的目标回波信号可以表示成:
()()()()()()???-==+==θθθθθθθθ022 011F K F K u F K F K u a a a a (2-2) 其中a K 为回波信号的幅度系数。 对于比幅法,直接计算两回波信号的幅度比值有: ()()()() θθθθθθ-+=0021F F u u (2-3) 根据上式比值的大小可以判断目标回波信号偏角θ的方向,再通过查表就可以估计出θ的大小。 对于和差法,由()θ1u 和()θ2u 可计算得到其和值()θ∑u 及差值()θ?u 分别如下: ()()()()()()()()()()()()???--+=-=-++=+=? ∑θθθθθθθθθθθθθθ00210021F F K u u u F F K u u u a a (2-4) 其中()()()θθθθθ-++=∑00)(F F F 称为和波束方向图; ()()()θθθθθ--+=?00)(F F F 称为差波束方向图。 若θ很小(在等强信号轴附近),根据泰勒公式可以将 ()θθ+0F 和()θθ-0F 展 开近似为: ()()()()()()()()()()()()???'-=+'-=-'+≈+'+=+θ θθθθθθθθθθθθθθθθθ002000002000F F o F F F F F o F F F 进一步可以得到: ()()()()???'≈≈? ∑θθθθθ0022F K u F K u a a (2-5) 归一化和差信号值可得: ()()()() υθθθθθθ='=∑?00F F u u (2-6) 其中()()00θθυF F '= 是天线方向图在波束偏转角0θ处的归一化斜率系数。
单脉冲天线
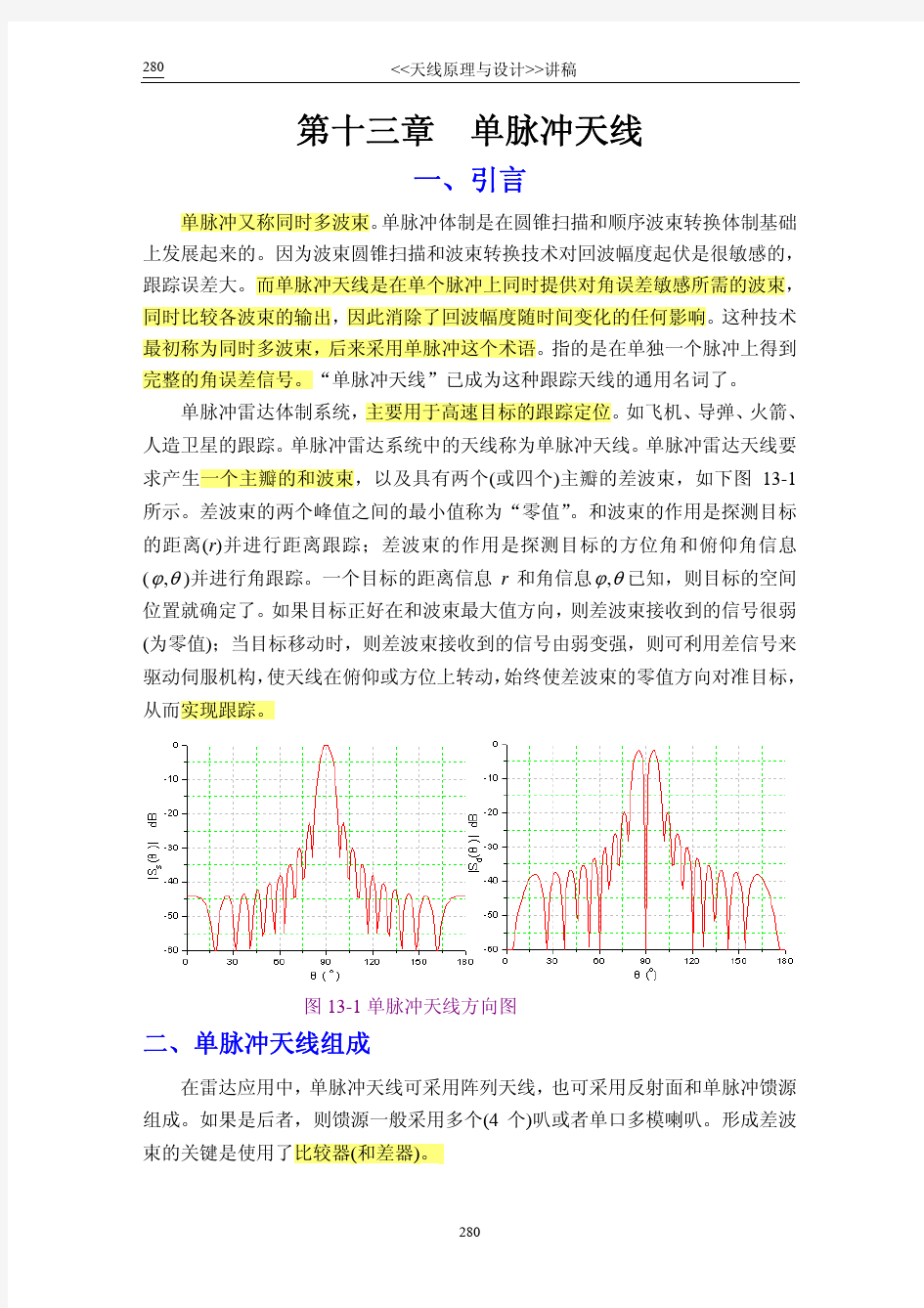
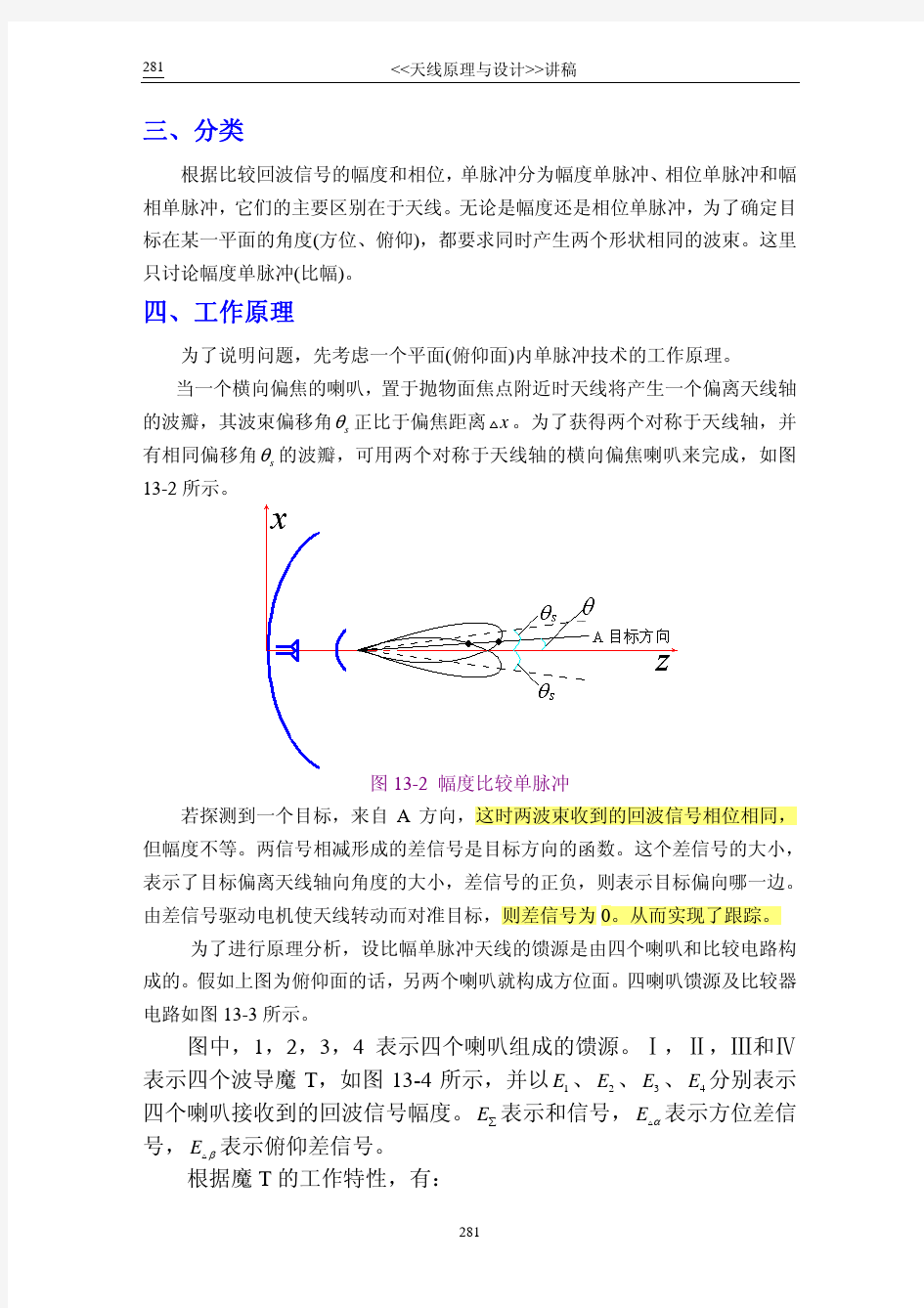
第十三章单脉冲天线 一、引言 单脉冲雷达体制系统,主要用于高速目标的跟踪定位。如飞机、导弹、火箭、人造卫星的跟踪。单脉冲雷达系统中的天线称为单脉冲天线。单脉冲雷达天线要求产生一个主瓣的和波束,以及具有两个(或四个)主瓣的差波束,如下图13-1所示。差波束的两个峰值之间的最小值称为“零值”。和波束的作用是探测目标的距离(r)并行距离跟踪;差波束的作用是探测目标的方位角和俯仰角信息(,?θ)并行角跟踪。一个目标的距离信息r和角信息,?θ已知,则目标的空间位置就确定了。如果目标正好在和波束最大值方向,则差波束接收到的信号很弱(为零值);当目标移动时,则差波束接收到的信号由弱变强,则可利用差信号来驱动伺服机构,使天线在俯仰或方位上转动,始终使差波束的零值方向对准目标,从而实现跟踪。 图13-1单脉冲天线方向图 二、单脉冲天线组成。 在雷达应用中,单脉冲天线可采用阵列天线,也可采用反射面和单脉冲馈源组成。如果是后者,则馈源一般采用多个(4个)叭或者单口多模喇叭。形成差波束的关键是使用了比较器(和差器)。 三、分类。 根据比较回波信号的幅度和相位,单脉冲分为幅度单脉冲、相位单脉冲和幅相单脉冲,它们的主要区别在于天线。无论是幅度还是相位单脉冲,为了确定目标在某一平面的角度(方位、俯仰),都要求同时产生两个形状相同的波束。这里只讨论幅度单脉冲(比幅)。 四、工作原理。 为了说明问题,先考虑一个平面(俯仰面)内单脉冲技术的工作原理。
当一个横向偏焦的喇叭,置于抛面焦点附近时天线将产生一个偏离天线轴的 θ正比于偏焦距离x。为了获得两个对称于天线轴,并有波瓣,其波束偏移角 s θ的波瓣,可用两个对称于天线轴的横向偏焦喇叭来完成,如图13-2相同偏移角 s 所示。 图13-2 幅度比较单脉冲 若探测到一个目标,来自A方向,这时两波束收到的回波信号,相位相同,但幅度不等。两信号相减形成的差信号是目标方向的函数。这个差信号的大小,表示了目标偏离天线轴向角度的大小,差信号的正负,则表示目标偏向哪一边。由差信号驱动电机使天线转动而对准目标,则差信号为0。从而实现了跟踪。 一般的比幅单脉冲天线的馈源是由四个喇叭和比较电路构成的。假如上图为俯仰面的话,另两个喇叭则构成方位面。四喇叭馈源及比较器电路如图13-3所示。 图13-3 幅度比较单脉冲天线的馈源和比较器
基于单片机的卫星天线伺服系统
2012年4月 内蒙古科技与经济 A pril 2012 第7期总第257期 Inner M o ngo lia Science T echnolo gy &Economy N o .7T o tal N o .257 基于单片机的卫星天线伺服系统 邢建钢,田世军 (内蒙古广播电影电视局501台,内蒙古呼和浩特 010070) 摘 要:介绍了卫星天线伺服系统的主要任务是使天线快速而准确地转动到应对准的目标卫星。针对各个跟踪系统的方案所具有的各自不同的针对性,探讨了天线伺服系统的最佳方案。 关键词:卫星天线;稳定控制系统;单片机;步进电机 中图分类号:T M 383.6∶T N 828 文献标识码:A 文章编号:1007—6921(2012)07—0069—021 卫星天线伺服系统的硬件设计1.1 天线及其控制器硬件设计 硬件是指单片机微处理器及其外围设备之和,包括:中央处理器、存储器、显示器、人机对话的键盘、D /A 转换器、A /D 转换器、接口电路和驱动电路等。 微处理器是整个跟踪系统程序执行的核心,它负责完成被控对象的各种参数的判断、监控和处理;微电脑的接口是信息的传输通道,其主要作用是微处理器通过传输通道将电信号转换成各种驱动信息,来完成对外设的控制动作,其次是主机与外设之间负载的匹配、电平的转换和电器隔离等。执行机构是机械部分包括各种继电器、电机、电磁铁等。天线跟踪系统控制器的总体硬件结构图如图1 所示。 图1 硬件系统框 1.2 天线控制器的硬件模块 整个天线控制器的应用系统主要包含如下机构模块:单片机模块、电机驱动模块、信号采集提取模块。 1.2.1 单片机的选型 笔者采用At m el 公司16位80C51系列单片机AT 89C 51结构,作为系统的主控芯片,分别控制方位电机和俯仰电机。作为主机负责控制方位电机和俯仰电机及其键盘处理等功能。1.2.2 信号采集取样模块 采集取样模块包含了直流信号电平的采集。由于所需采集的电压值采样范围0~+7.5V,所以在选取的时候要用AD 574转换器A /D 转换,8位的数据格式输出。 自动控制寻星系统信号的取样,一般采用卫星转发的信标信号,信标接收机传送给微处理器产生 相应的控制信号,但对于本文的设计不合适,一是设备复杂,二是造价高。 数字卫星接收机在自动控制寻星时,自身有一些检测,如信号强度显示、纠错等,这些功能反映了接收信号的各项指标,并且提供了提取接收信号电平的方法。 信号的强弱可通过AGC 电平来反映。将A GC 电路提取的信号转换成对数,就是用分贝值表示了信号强度。但仅靠AGC 电平,是无法分辨出是原发信号还是噪声干扰信号。因此信号强弱的表示必须要和载噪比综合起来考虑。 载噪比是反映数字机的一项重要指标,它的原理是计算接收信号星座的离散性。在传输信道中,噪声越大,离散性越大。所以对载噪比的检测要从计算星座的离散性入手,对接收到的每个符号,计算它的星座位置与理想位置的距离(矢量),然后求统计平均值。当统计平均值(离散度)越大,表明载噪比越差。除了噪声以外,干扰信号也会导致星座的离散。所以,上面计算的载噪比中实际上是载-噪比(C /N )和受干扰时的信-干比(SIR)。数字接收机也具有锁定检测功能,锁定检测包括两个方面的内容:其一载波锁定检测;二时钟锁定检测。 当调谐器进行QP SK 解调时,调谐器本振信号与输入载波就实现了锁相,此时调谐器会输出一个CF (Carrier reco very Flag )标志。 解调出数据信号,时钟开始恢复,并对接收的符号进行计数。在L ink 电路中使用了一个计数器对B8H 进行加减计数,B8H 是由204字节包中每过8个包翻转成的,同步字节是47H 。正向计数溢出时会产生(T iming lock Flag )标志。出现T F 标志意味着接收的T S 流已经实现同步,对于“盲扫”的接收机而言,确定了相邻B8H 字节的时间间隔还意味着搜索到了接收信号的符号率,也就是完成了对符号率的盲扫。 CF 标志和T F 标志进行逻辑“与”,就产生了锁定指示,即LK (Lo ck )指示。只要卫星接收机发出了锁定指示,就表示已经稳定了收到的信号。反之,当接收机失锁时,MP EG-2解码器停止解码,同时机器发出失锁告警,此时显视器上将显示黑屏或静帧。 综上所述,数字卫星接收机的检测信号功能均在主机CPU 的控制下,由L ink 电路来完成。所有的检测结果可通过串行数据口输出,对应着ST i5518 ? 69? 收稿日期:2012-02-18
Ka波段单脉冲平面和差网络和天线的研究
Ka波段单脉冲平面和差网络和天线的研究 1 引言从20 世纪40 年代后期开始,毫米波单脉冲雷达技术逐步得到发展和应用,尤其是在航空和导弹防御系统中,毫米波单脉冲雷达发挥着重要的作用。毫米波单脉冲天线馈电网络是毫米波雷达的关键技术之一。传统的和差网络由魔T 构成,但结构过于庞大,不易实现平面化、集成化,并且成本较高。随着微带印刷技术的不断发展,微带结构的和差网络被广泛应用,但是毫米波波段的微带电路的损耗很大,并且功率承受能力较低。本文设计的Ka 波段平面和差网络采用波导缝隙耦合结构,具有结构简单、成本低、损耗小、各端口幅度和相位一致性好等优点。 2 和差网络模型及工作原理最早的缝隙耦合式波导和差器是由H.A.Bethe 提出的,它的原理是:在两根平行的矩形波导公共窄壁上开一个耦合裂缝构成 90°混合电桥,如图1 所示。根据3dB 电桥原理,通过改变耦合裂缝的长度可以调整两波导间的耦合度,使直通端口和耦合端口的输出功率相等。由于耦合端口的电场相位滞后直通端口的电场相位90°,所以直通端口和耦合端口存在90°的相位差,可以在输入端口增加四分之一波长的波导段消除相差。图1 中port1 和port4 为输入端口,port2 为和信号输出端口,port3 为差信号输出端口。 图1 缝隙电桥(左)及和差器构成原理图(右) 在图1 所示的结构中,设从输入端口输入电场幅度为E 的TE10 波,其余端口均接匹配负载。选取合适的波导尺寸,使主副波导耦合段内只能传输TE10 和TE20 两种模式的电磁波。根据叠加原理,输入端的电磁波等效于在port1 和port4 同时输入电场幅度为E/2 的偶模波和奇模波的叠加。设波导宽壁的内
单脉冲自动测角系统在导引头中的应用
雷达原理大作业——单脉冲自动测角系统在导引头中的应用 学院:电子工程学院 完成人及学号:
杨超() 王东旭() 韩孟洲() 程荣() 谭宗欣() 于振浩()任课教师:饶鲜
目录: 一、单脉冲自动测角系统简介- 4 - 1.单脉冲雷达- 4 - 2.自动测角系统- 4 - 3.单脉冲自动测角系统- 4 - 二、单脉冲自动测角原理- 5 - 1.振幅定向法- 5 - 2.相位定向法- 7 - 三、单脉冲自动测角系统的特点- 7 - 1.角度跟踪精度- 7 - 2.天线增益和作用距离- 8 - 3.角度信息的数据率- 8 - 4.抗干扰能力- 8 - 5.复杂程度- 8 - 四、单脉冲自动测角系统的仿真- 9 - 五、单脉冲雷达的应用- 12 - 六、总结- 13 -
一、单脉冲自动测角系统简介 1.单脉冲雷达 单脉冲雷达是一种精密跟踪雷达。它每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。 2.自动测角系统 在火控系统中使用的雷达,必须快速连续地提供单个目标(飞机、导弹等)坐标的精确数值,此外在靶场测量、卫星跟踪、宇宙航行等方面应用时,雷达也是观测一个目标,而且必须精确地提供目标坐标的测量数据。 为了快速地提供目标的精确坐标值,要采用自动测角的方法。自动测角时,天线能自动跟踪目标,同时将目标的坐标数据经数据传递系统送到计算机数据处理系统。 和自动测距需要有一个时间鉴别器一样,自动测角也必须要有一个角误差鉴别器。当目标方向偏离天线轴线(即出现了误差角ε)时,就能产生一误差电压。误差电压的大小正比于误差角,其极性随偏离方向不同而改变。此误差电压经跟踪系统变换、放大、处理后,控制天线向减小误差角的方向运动,使天线轴线对准目标。 用等信号法测角时,在一个角平面内需要两个波束。这两个波束可以交替出现(顺序波瓣法),也可以同时存在(同时波瓣法)。前一种方式以圆锥扫描雷达为典型,后一种是单脉冲雷达。 3.单脉冲自动测角系统 单脉冲自动测角属于同时波瓣测角法。在一个角平面内,两个相同的波束部分重叠,其交叠方向即为等信号轴。将这两个波束同时接收到的回波信号进行比较,就可取得目标在这个平面上的角误差信号,然后将此误差电压放大变换后加到驱动电动机,控制天线向减小误差的方向运动。因为两个波束同时接收回波,故单脉冲测角获得目标角误差信息的时间可以
一种无人机通信天线伺服系统的构建
一种无人机通信天线伺服系统的构建 一种无人机通信天线伺服系统的构建 摘要:介绍了一种定向数据通信天线伺服系统的实现。该天线伺服系统可以用于作用半径为150km的近程无人机地面测控天线跟踪,其系统跟踪体制采用GPS引导方式,具有实现简单、工作稳定、便于维护等特点。从系统设计原理出发,阐述了GPS引导跟踪算法,说明了系统组成和控制原理,提出了一些关键性设计要点和附加功能,并根据实际使用数据进行了归纳和分析,提出了简单可行的改进措施。关键词:无人机; GPS;天线伺服;数据链系统 ? 随着无人机技术的不断发展,对高带宽微波数据链路作用距离要求也随之提高,通过提高地面或机载的发射机功率和增加接收机灵敏度的方式已经无法满足远距离通信要求,而提高地面测控天线接收发射增益是一种行之有效办法,且不会增加机载通信设备重量和尺寸。定向通信天线因为在波束角范围内具有高增益而被广泛运用于中近程无人机的测控通信,天线通过定向辐射和接收信号的方式,将能量作用在有用范围,减少了能量耗散,提高了发射增益。但正是由于定向发射接收信号的特点,决定了该种天线必须配备一种引导跟踪系统才能用于无人机这种动态跟踪通信应用上。作为测控对象的近程无人机,因为有一定运动速度且距离较近,从而对地面测控天线伺服系统的跟踪角速度和加速度都有要求。对于近程无人机系统,设计和制造成本都受约束,所以实现简单稳定的天线伺服系
统是无人机的数据通信系统中一个重要组成部分。目前国内无人机测控定向天线多采用单通道单脉冲跟踪体制,通过信号相位关系来进行方位俯仰判断,需要一套复杂的天线伺服反馈系统,成本很高,维护检修技术要求较高。此外,在实际使用中,很容易受到干扰而导致天线乱转。本系统利用GPS引导方式和无刷伺服电机控制,实现了对螺旋定向天线(波束角小于24°,增益15dB)的方位角一维伺服控制。由于GPS信号具有比自跟踪的信号更加稳定、数字化更强、实现简单的特点,可用于无人机测控应用。经过实际长时间的应用验证,该系统跟踪效果可以满足要求,并具有一定预留扩展性。1系统框架系统可以进行GPS引导跟踪和定角度转动两种作用模式,并具有日志记录和界面显示功能。控制软件在遥控遥测计算机上运行。在定角度转动模式下,伺服电机控制回路根据给定的角度进行转动;在跟踪模式下,系统以一定周期(80ms)从遥测数据得到无人机位置,并根据本地位置以及当前天线转角确定转动角度,伺服电机控制回路执行转动。系统整体框架,本地GPS提供当前地面站位置和车头方向的数据,电动机控制器、位置编码器、伺服电机构成了伺服回路,带动减速器驱动转台旋转,光电开关是初始化时使天线对准车头的基准限位,并在运行过程中可以消除位置编码器累计误差。为实现转台任意旋转,系统中选用高频导电滑环进行转台上下两端的信号传输。 ? 2系统方案2.1转动角解算[1]在无人机(UAV)当前经纬度、本地经纬度、车头方向都已知的条件下,就可以利用图2所示关系求得无人机与车头方向的夹角,通过位置编码器可知当前天线方向,即可知天线转动角度。
单脉冲雷达角度跟踪技术研究
单脉冲雷达角度跟踪技术研究 【摘要】简单介绍了单脉冲雷达的特点及工作原理,重点分析了多部干扰机对单脉冲雷达的角度干扰问题,并对相干干扰和非相干干扰的干扰效果进行了讨论,指出两点源非相干干扰是实际工程中一种比较理想的干扰方式。 【关键词】单脉冲雷达、角度跟踪、相干干扰、非相干干扰 一、引言 对雷达进行干扰要对准雷达的四个系统:显示系统、距离跟踪系统、速度跟踪系统和角度跟踪系统。在雷达发展的早期,只要对前三个系统中的一个(或两个)系统进行有效地干扰,就可达到破坏雷达角跟踪系统正常工作的目的。现在随着新体制雷达的出现和抗干扰技术的不断提高,尤其是单脉冲雷达体制的出现,使很多干扰技术难以奏效。本文以振幅和差式单脉冲雷达为例,讨论了用多部干扰机对单脉冲雷达实施干扰的情况。 二、分析 1.单脉冲雷达 ◆定义 单脉冲雷达是指由单个回波脉冲即可获得目标空间角信息的雷达。 ◆特点 单脉冲雷达是一种精密跟踪雷达。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。美国、英国、法国和日本等国军队大量装备单脉冲雷达,主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。目前使用的单脉冲雷达基本上都实现了模块化、系列化和通用化,具有多目标跟踪、动目标显示、故障自检、维修方便等特点。 ◆分类 根据从回波中获取角信息的方式(测角法)不同,单脉冲雷达可分为振幅法(比幅)、相位法(比相)和综合法(振幅相位)3种。这3种测角法又可用3种角度鉴
别器(振幅式、相位式、和差式)中的任何一种来获得目标的角度信息,因此综合起来有9种形式的单脉冲雷达系统,其中以振幅和差式单脉冲雷达系统用的最多。通常分为有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类。 工作原理 单脉冲雷达每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。它具有圆锥扫描雷达所没有的优点:获得角误差信息的时间短(以微秒计算);不受回波振幅起伏变化的影响;测角精度高(0.1~0.5mil);测角支路抗幅度调制干扰(如回答式倒相干扰)的能力强。振幅和差式单脉冲雷达系统的基本工作原理:将两个比幅天线方向图所得的幅度不同的信号经过和差变换器之后,再把和信号(U∑ )、差信号(U△ )加到鉴相器得出差信号。 2 雷达角跟踪技术 2.1 信号处理和测量技术 PD采用一种合适的且可以适当改变的配置方式及数据处理算法,可成功的实现跟踪低仰角目标。假定一种处理算法,地面的反射系数应有一个确定的模型(如镜面反射和几何光学原理),重要的是要估计这样的算法偏离假定的反射模型的灵敏度如何。在一个真实系统中,这样的偏差肯定会发生。即使是光滑的镜面表面(理想的镜面反射),当雷达位于几倍天线直径大的该表面时,由物理光学原理即菲涅尔区,也需要校正。关键的问题是,在反射的雷达信号中有多少是未知量,要确定这些未知量,雷达需要测量的量是多少,很明显,在多路径效应下,未知数的数量会增加。雷达必须做更多的测量才能获得反射平面的信息以鉴别目标的真实仰角。但是更多的工作是需要找到最优的算法,需要确定它们对不同反射系数模型的灵敏度。
极化对单脉冲天线差波束指向的影响分析
第32卷第11期2010年11月 现代雷达 ModernRadar V01.32No.1l Nov.2010 ?天馈伺系统-中图分类号:TN820文献标志码:A文章编号:1004—7859{2010)11—0070—03极化对单脉冲天线差波束指向的影响分析 刘志惠,孙磊 (南京电子技术研究所,南京210039) 摘要:单脉冲雷达天线的差波束指向和灵敏度通常受2个通道的幅相不平衡性影响,通过仿真计算和测试,在某些情况下。天线极化形式也会对差波束指向带来影响,例如斜45。极化。文中对几种典型模型进行了仿真、对比,并结合测试情况,分析了这种现象的成因、产生条件、对雷达性能的影响,最后给出了几种解决方案。 关键词:单脉冲雷达;差波束指向;极化 Polarization7SImpactonOffsetBeamDirectionalityof theMonopulseAntenna LIUZhi—hui,SUNLei (NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China) Abstract:Theoffsetbeamdirectionalityandsensitivityofthemonopulseradarfiremainlyinfluencedbythegain—phaseimbalanceofthetwochannels.Basedonsimulationandtest,theoffsetbeamdirectionalityCallbealsoinfluencedbythepolarizationofthe antennainsomesituations,suchillsthe45。inclinedpolarization.Inthispapersometypicalmodelsaresimulatedand compared. The genesis,conditionsandthe influenceonradarareanalyzed.Somesolvingmethodsareintroducedintheend.Keywords:monopulseradar;offset beamdirectionality;polarization 0引‘言 单脉冲雷达天线常用的极化形式有水平线极化、 垂直线极化、圆极化¨。4J,某些情况下还会用到斜45。 极化,比如在无源探测领域,经常会用到450斜极化。 对于水平极化和垂直极化,差波束指向主要受幅度和 相位的不平衡性影响。对45。斜极化,差波束指向除 了受幅度和相位的不平衡性影响外,在偏离法平面的 切面上,天线的极化形式还会带来固有的指向偏差,即 空间的三维差零深面不再是呈水平或垂直方向,而是 存在一个小角度的倾斜,倾斜方向和倾斜程度直接受 天线单元在阵中所表现的辐射特性决定。在天线的俯 仰法平面上,差波束指向没有偏差,但偏离俯仰法平面 时,指向将出现偏差,且偏差程度随俯仰方向偏离法平 面角度的增大而增大。 l极化形式对差波束指向影响的仿真分析 对一个2×2排列的振子阵列的方位差特性进行 了仿真计算。 如图1所示,垂直极化单元的方位差零深面呈垂 直方向。如图2所示,斜450极化单元阵列差零深面 则有一个小角度的倾斜,且零深变浅。经过分析,我们 通信作者:刘志惠 收稿日期:2010-06-20??-——70?————Emall:lzh_rat@163.com 修订日期:2010-09-28’ 发现有2个因素导致差零深面的倾斜:(1)阵列单元 的波瓣图不等化,如图3所示:振子单元H面波瓣比E 面波瓣宽,因此在偏离俯仰面法平面的A点,单元l 的场弱于单元2的场,导致在该处的场虽然在相位上 反相,但幅度不同,不能完全抵消,而在离单元2稍远 的B点出现了合成的最小值,但由于相位也出现了偏 差,因此差零深也相应变浅。(2)在阵中环境中,天线 单元的等效相位中心发生了偏移,从而导致差零深面 出现倾斜,如图4所示。 图1垂直极化单元及其波瓣图 差波束指向角的偏差程度随俯仰方向偏离法平面 角度的增大而增大,并受上述2个因素综合影响,当某 个因素占优势时,差零深面呈现相应的倾斜方向。在 该计算频点上,波瓣的不等化的因素占优势,差零深面 呈现如图3所示的倾斜方向。而且当俯仰面波束边窄 (此处我们以俯仰面单元数量的增大来实现)时,差零 深面的倾斜角也增大,如图5所示。 万方数据
天气雷达天线伺服控制系统研究
第27卷 第4期2010年12月河 北 省 科 学 院 学 报Jo urnal o f the H ebei A cademy o f Sciences V o l.27N o.4Dec.2010 收稿日期:2010-08-30 作者简介:乔建江(1974-),男,硕士,工程师,主要从事天线伺服控制系统的设计与研究. 文章编号:1001-9383(2010)04-0038-05 天气雷达天线伺服控制系统研究 乔建江 (中国电子科技集团公司第54所,河北石家庄 050081) 摘要:介绍了某天气雷达天线伺服控制系统的设计,提出了解决伺服带宽的方法:伺服系统环路设计中采 用凹口滤波器技术、串联滞后补偿网络、加速度负反馈技术和复合控制技术来抑制伺服系统结构谐振频率进而提高伺服系统带宽;采用Bang Bang 控制技术加快系统快速性,较好的解决了伺服控制系统设计中系统快速性和系统稳定性的问题;实际应用表明,该天线伺服控制系统设计方案是合理的成功的。关键词:凹口滤波器;Bang Bang 控制;复合控制;加速度负反馈中图分类号:T N820.3 文献标识码:A The research on weather radar antenna servo control system QIAO Jian jian g (T he 54th Resear ch Institud e of CET C ,Shij iaz huang H ebei 050081,China) Abstract:The desig n for one kind of w eather r adar antenna servo contr ol sy stem w as presented.And som e so lutions for the servo bandw idth are provided here:Notch filer technique,Serial lag com pensa to ry netw o rk,Acceleration Negativ e Feedback and Compound Contr ol w ere adopted in loop cir cuit de sign to restrain the m achinery reso nance of servo control system and then improv e the servo sy stem bandw idth.T he Bang Bang control w as applied here to improve the dynam ic perform ance.This kind of design solv ed the pro blems for system speediness and stability.In practical applicatio ns,this design w as also prov ed to be r easo nable and successful. Keywords:Notch filer;Bang Bang Control com pound control;Acceleratio n negative feedback 0 引言 一般的高精度天线伺服控制系统要求有定位和等速跟踪功能,定位控制精度高,响应快,等速跟踪平稳。而在我们设计的伺服控制系统中,天线的转动要求伺服控制系统快速无超调进行大角度调转、定位精度高,而且伺服系统要具有多种快速扫描方式:水平扫描、垂直扫描以及快速定位等。这些都将对伺服系统的环路设计提出更高的要求。本文主要就是对该天线伺服控制系统环路中的几个关键部分方案进行探讨和分析。 1 伺服带宽分析 伺服带宽是天线伺服控制系统中很重要的一项指标,它反映了天线跟随目标的能力。对于大型天线伺服系统来说,伺服带宽及其稳定裕度主要受天线座结构谐振频率及其阻尼系数所制约。可见,提高天线座结构谐振频率和阻尼系数就能提高伺服系统的带宽及其稳定裕度。 天线座的结构谐振频率计算公式[1]为: f L = 12 K J (1)
4 脉冲信号产生电路共23页文档
4 脉冲信号产生电路 4.1 实验目的 1.了解集成单稳态触发器的基本功能及主要应用。 2.掌握555定时器的基本工作原理及其性能。 3.掌握用555定时器构成多谐振荡器、单稳态触发器的工作原理、设计及调试方法。 4.2 实验原理 1.集成单稳态触发器及其应用 在数字电路的时序组合工作中,有时需要定时、延时电路产生定时、展宽延时等脉冲,专门用于完成这种功能的IC,就是“单稳延时多谐振荡器”,也称“单稳触发器”。其基本原理是利用电阻、电容的充放电延时特性以及电平比较器对充放电电压检测的功能,实现定时或延时,只需按需要灵活改变电阻、电容值大小,就可以取得在一定时间范围的延时或振荡脉冲输出。常用的器件有LS121/122、LS/HC123、LS/HC221、LS/HC423、HC/C4538及CC4528B等。 集成单稳态触发器在没有触发信号输入时,电路输出Q=0,电路处于稳态;当输入端输入触发信号时,电路由稳态转入暂稳态,使输出Q=1;待电路暂稳态结束,电路又自动返回到稳态Q=0。在这一过程中,电路输 出一个具有一定宽度的脉冲,其宽度与电路的外接定时元件C ext 和R ext 的数 值有关。 图4-1
集成单稳态触发器有非重触发和可重触发两种,74LS123是一种双可重触发的单稳态触发器。它的逻辑符号及功能表如图4-1、表4-1所示。 在表4-1中“正”为正脉冲,“负”为负脉冲。 LS/HC123的特点是,复位端CLR也具有上跳触发单稳态过程发生的功能。 在C ext >1000pF时,输出脉冲宽度t w ≈0.45R ext C ext 。 器件的可重触发功能是指在电路一旦被触发(即Q=1)后,只要Q还未恢复到0,电路可以被输入脉冲重复触发,Q=1将继续延长,直至重复触发的最后一个触发脉冲的到来后,再经过一个t w (该电路定时的脉冲宽度)时间,Q才变为0,如图4-2所示: 图4-2 74LS123的使用方法: (1)有A和B两个输入端,A为下降沿触发,B为上升沿触发,只有AB=1时电路才被触发。 (2)连接Q和A或Q与B,可使器件变为非重触发单稳态触发器。 (3)CLR=0时,使输出Q立即变为0,可用来控制脉冲宽度。 (4)按图4-3、3-5-4连接电路,可组成一个矩形波信号发生器,利用开关S瞬时接地,使电路起振。 图4-3 图4-4 2.555时基电路及其应用 555时基电路是一种将模拟功能和数字逻辑功能巧妙地结合在同一硅片上的新型集成电路,又称集成定时器,它的内部电路框图如图4-5所示。 图4-5 电路主要由两个高精度比较器C 1、C 2 以及一个RS触发器组成。比较器 的参考电压分别是2/3V CC 和1/3V CC ,利用触发器输入端TR输入一个小于 1/3V CC 信号,或者阈值输入端TH输入一个大于2/3V CC 的信号,可以使触发 器状态发生变换。CT是控制输入端,可以外接输入电压,以改变比较器的参考电压值。在不接外加电压时,通常接0.01μF电容到地,DISC是放电输入端,当输出端的F=0时,DISC对地短路,当F=1时,DISC对地开路。 R D 是复位输入端,当R D =0时,输出端有F=0。 器件的电源电压V CC 可以是+5V~+15V,输出的最大电流可达200mA,当 电源电压为+5V时,电路输出与TTL电路兼容。555电路能够输出从微秒级到小时级时间范围很广的信号。 (1)组成单稳态触发器 555电路按图4-6连接,即构成一个单稳态触发器,其中R、C是外接定时元件。单稳态触发器的输出脉冲宽度t w ≈1.1RC。 图4-6 (2)组成自激多谐振荡器 图4-7 自激多谐振荡器电路 按图4-7连接,即连成一个自激多谐振荡器电路,此电路的工作过程
雷达天线伺服控制系统
概述 用来精确地跟随或复现某个过程的反馈控制系统。又称随动系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。位置指令与被控量可以是直线位移或角位移。随着工程技术的发展,出现了各种类型的位置随动系统。由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。伺服系统的精度主要决定于所用的测量元件的精度。此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理 图1-1 雷达天线伺服控制系统原理图 1.2 系统的结构组成 从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。 现在对系统的组成进行分析: 1、受控对象:雷达天线 2、被控量:角位置m θ。 3、干扰:主要是负载变化(f 及L T )。 4、给定值:指令转角*m θ。 5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。 6、比较计算:两电位器按电桥连接,完成减法运算*U U e -=(偏差)。 7、控制器:放大器,比例控制。 8、执行器:直流电动机及减速箱。
脉冲分频信号产生器
沈阳航空航天大学 课程设计 (说明书) 脉冲分频信号产生器设计 班级24020103 学号2012040201131 学生姓名郁健 指导教师关庆阳
沈阳航空航天大学 课程设计任务书 课程名称电子技术综合课程设计____ 课程设计题目脉冲分频信号产生器 课程设计的内容及要求: 一、设计说明与技术指标 设计一个脉冲分频信号产生器,技术指标如下: ①能够输出1KHz脉冲信号; ②能够输出10KHz脉冲信号; ③能够输出100Hz脉冲信号; 二、设计要求 1.在选择器件时,应考虑成本。 2.根据技术指标,通过分析计算确定电路和元器件参数。 3.画出电路原理图(元器件标准化,电路图规范化)。 三、实验要求 1.根据技术指标制定实验方案;验证所设计的电路,用软件仿真。 2.进行实验数据处理和分析。 四、推荐参考资料 1. 童诗白,华成英主编.模拟电子技术基础.[M]北京:高等教育出版社,2006年 五、按照要求撰写课程设计报告
成绩评定表: 序号评定项目评分成绩 1 设计方案正确,具有可行性,创新性(15分) 2 设计结果可信(例如:系统分析、仿真结果)(15分) 3 态度认真,遵守纪律(15分) 4 设计报告的规范化、参考文献充分(不少于5篇)(25分) 5 答辩(30分) 总分 最终评定成绩(以优、良、中、及格、不及格评定) 指导教师签字: 2015 年01 月14日
一、概述 该脉冲分频信号产生器可以实现10KHZ 、1KHZ 、100HZ 三路频率输出,电路结构相对简单,输出频率相对稳定,且能够有效的实现频率间的转变,具有节能,经济,功能具备的特点。 二、方案论证 设计一个脉冲分频信号产生器,技术指标如下: ①能够输出1KHz 脉冲信号; ②能够输出10KHz 脉冲信号; ③能够输出100Hz 脉冲信号; 方案一: 方案一原理框图如图1所示。 降频 降频 图1 方案一脉冲分频电路的原理框图 方案二: 方案二原理框图如图2所示。 升频 降频 图2 方案二脉冲分频电路的原理框图 由555定时器组成的多谐振荡器产生频率为10KHZ 的脉冲信号 由74LS160组成的十分频电 路 由74LS160组成的十分频电路 输出 1KHZ 输出 100HZ 输出 10KHZ 由555定时器组成的多谐振 荡器产生频率 为1KHZ 的脉冲信号 锁相环升频 74LS160降频 输出10KHZ 输出100HZ 输出1KHZ
自动控制原理课程设计-雷达天线伺服控制系统要点
雷达位置伺服系统校正 班级: 0xx班 学号: xx 姓名: xx 指导老师: x老师 —2011.12
雷达位置伺服系统校正 一、雷达天线伺服控制系统 (一) 概述 用来精确地跟随或复现某个过程的反馈控制系统。又称随动系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。位置指令与被控量可以是直线位移或角位移。随着工程技术的发展,出现了各种类型的位置随动系统。由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。伺服系统的精度主要决定于所用的测量元件的精度。此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。系统的原理图如图1-1所示。 图1-1 雷达天线伺服控制系统原理图 (二) 系统的组成 从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、执行机构。以上部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。