单脉冲天线

第十三章单脉冲天线
一、引言
单脉冲雷达体制系统,主要用于高速目标的跟踪定位。如飞机、导弹、火箭、人造卫星的跟踪。单脉冲雷达系统中的天线称为单脉冲天线。单脉冲雷达天线要求产生一个主瓣的和波束,以及具有两个(或四个)主瓣的差波束,如下图13-1所示。差波束的两个峰值之间的最小值称为“零值”。和波束的作用是探测目标的距离(r)并行距离跟踪;差波束的作用是探测目标的方位角和俯仰角信息(,?θ)并行角跟踪。一个目标的距离信息r和角信息,?θ已知,则目标的空间位置就确定了。如果目标正好在和波束最大值方向,则差波束接收到的信号很弱(为零值);当目标移动时,则差波束接收到的信号由弱变强,则可利用差信号来驱动伺服机构,使天线在俯仰或方位上转动,始终使差波束的零值方向对准目标,从而实现跟踪。
图13-1单脉冲天线方向图
二、单脉冲天线组成。
在雷达应用中,单脉冲天线可采用阵列天线,也可采用反射面和单脉冲馈源组成。如果是后者,则馈源一般采用多个(4个)叭或者单口多模喇叭。形成差波束的关键是使用了比较器(和差器)。
三、分类。
根据比较回波信号的幅度和相位,单脉冲分为幅度单脉冲、相位单脉冲和幅相单脉冲,它们的主要区别在于天线。无论是幅度还是相位单脉冲,为了确定目标在某一平面的角度(方位、俯仰),都要求同时产生两个形状相同的波束。这里只讨论幅度单脉冲(比幅)。
四、工作原理。
为了说明问题,先考虑一个平面(俯仰面)内单脉冲技术的工作原理。
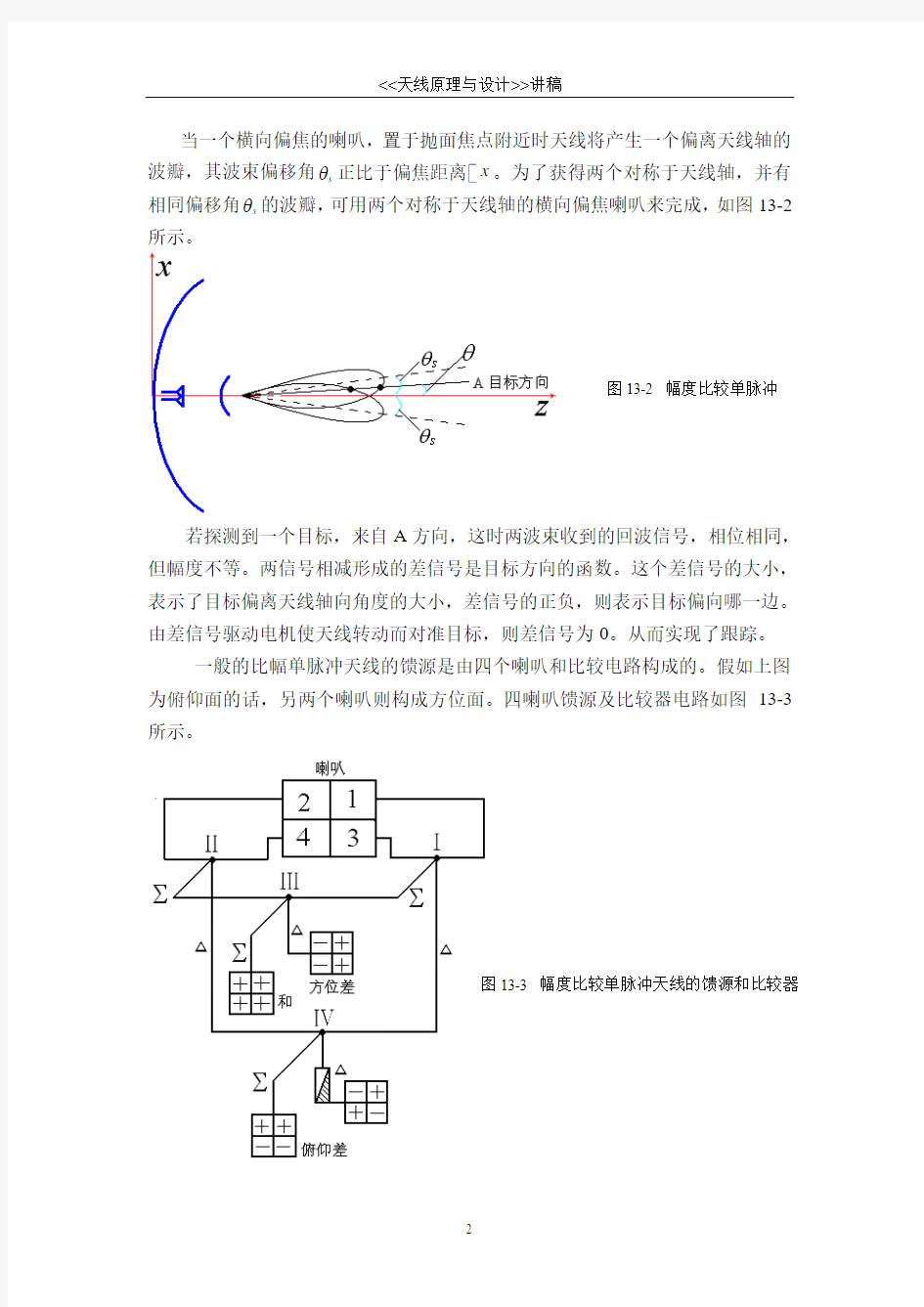
当一个横向偏焦的喇叭,置于抛面焦点附近时天线将产生一个偏离天线轴的
θ正比于偏焦距离x。为了获得两个对称于天线轴,并有波瓣,其波束偏移角
s
θ的波瓣,可用两个对称于天线轴的横向偏焦喇叭来完成,如图13-2相同偏移角
s
所示。
图13-2 幅度比较单脉冲
若探测到一个目标,来自A方向,这时两波束收到的回波信号,相位相同,但幅度不等。两信号相减形成的差信号是目标方向的函数。这个差信号的大小,表示了目标偏离天线轴向角度的大小,差信号的正负,则表示目标偏向哪一边。由差信号驱动电机使天线转动而对准目标,则差信号为0。从而实现了跟踪。
一般的比幅单脉冲天线的馈源是由四个喇叭和比较电路构成的。假如上图为俯仰面的话,另两个喇叭则构成方位面。四喇叭馈源及比较器电路如图13-3所示。
图13-3 幅度比较单脉冲天线的馈源和比较器
图中,1,2,3,4表示四个喇叭组成的馈源。Ⅰ,Ⅱ,Ⅲ和Ⅳ表示四个波导魔T ,如图13-4所示,并以1E 、2E 、3E 、4E 分别表示四个喇叭接收到的回波信号幅度。E ∑表示和信号,E α表示方位差信号,E β表示俯仰差信号。
图13-4 魔T
根据魔T 的工作特性,有:
和信号: 1234E E E E E
∑=+++ (13.1) 方位差信号:()()1324E E E E E α=+-+ (13.2) 俯仰差信号:()()1234E E E E E β=+-+ (13.3) 还有一路差信号()()1324E E E E ---为交差信号无用,该差支路信号接匹配负载吸收。
注:魔T (双T )的工作特性:
结构如图13-5所示。
图13-5 魔T 结构图
工作特性
接收时:当同频信号1E 、2E 由1口和2口输入时,3口输出为两信号的和值
12E E +。所以3臂称为和臂;4臂输出两信号的差值12E E -,所以称为
差臂。
发射时:信号由3臂输入3E ,则1、2两臂输出等幅同相信号1232E E E ==。此
时4臂隔离,无输出。
即有“对臂隔离邻臂分”之特性。
由于馈源的每个喇叭收到的信号的大小与目标的距离和方向有关。因此,它们形成的和信号称为和方向图,差信号称为差方向图。包括方位差和俯仰差方向图。和差波束的作用前面都提到了。即:
差波束产生差信号,实现目标的跟踪;
和波束在发射时照射目标,接收时提供目标的距离信息。并给差信号提供相位参考。
单脉冲天线的分析,主要有两种方法:
次级波束加减法
口径场法 ?次级波束加减法:是把馈源分离成n 个单独的馈源。例如把四喇叭馈源看作
四个馈源,每个喇叭各自产生偏轴的次级波束,然后把比较器的作用归结为对次级波束的直接相加和相减,从而得到单脉冲天线的和波束和两个差波束。
此法的优点是直观,对天线的工作原理来说物理概念明确。 ?口径场法:是将馈源和比较器视为一个整体。把接收时产生的三个波束用发
射状态来分析。馈源口径上有三种初级场分布,这三种初级场分布产生的三个初级波束照射反射面。在反射面口径上建立起相应的三种次极口径场分布,然后向空间发射三个次级波束。
图13-6 馈源的口径场分布 ?主要电气指标
单脉冲天线的电气参量与普通天线一样。也要用到增益、半功率波瓣宽度、副瓣电平等。但由于其工作体制的不同,还要用差波束的相对斜率、绝对斜率、分离角和零深及角灵敏度的指标。
图13-7 单脉冲天线方向图
单脉冲雷达
雷达大作业 单脉冲雷达在测角方面的应用 班级: 1302019 姓名: 指导教师:魏青
一、引言 1、背景 对目标的定向,是雷达的主要任务之一,单脉冲定向是雷达定向的一个重要方法。之所以叫“单脉冲”,是因为这种方法只需要一个目标回波脉冲,就可以给出目标角位置的全部信息。单脉冲技术由于其良好的测角、角跟踪性能和抗干扰能力,因此除了在跟踪雷达中应用之外,还广泛应用到各种武器平台的控制雷达当中。本文分析了标定方法确定天线方向图信息的理论有效性,给出利用标定结果进行宽带单脉冲测角的方法。 2、简介 宽带单脉冲雷达是将传统的单脉冲雷达加载宽带信号。在宽带信号观测下,目标可认为由一系列孤立的散射点组成。从而宽带单脉冲雷达测角实际上是测定一系列散射点的角度。宽带单脉冲雷达测角具有广泛的应用价值,除了标跟踪,还可以应用于三维成像。根据对宽带单脉冲测角的基本原理分析可知,天线方向图在测角中发挥了重要的作用,目前的文献在讨论宽带单脉冲测角时,通常都是采取与文献类似的方法: 根据理论模型,设定方向图函数。对于实际的宽带单脉冲雷达系统,方向图函数通常并不是严格的满足理论模型。此外,精确测量实际雷达系统的方向图际雷达系统进行标定来为测角提供必要的方向图信息。 二、单脉冲雷达的自动测角系统中的优势 1、角度跟踪精度 与圆锥扫描雷达相比,单脉冲雷达的角度跟踪精度要高得多。其主要原因有以下两点: 第一,圆锥扫描雷达至少要经过一个圆锥扫描周期后才能获得角误差信息,在此期间,目标振幅起伏噪声也叠加在圆锥扫描调制信号(角误差信号)上形成干扰,而自动增益控制电路的带宽又不能太宽,以免将频率为圆锥扫描频率的角误差信号也平滑掉,因而不能消除目标振幅起伏噪声的影响,在锥扫频率附近一定带宽内的振幅起伏噪声可以进入角跟踪系统,引起测角误差。而单脉冲雷达是在同一个脉冲内获得角误差信息,且自动增益控制电路的带宽可以较宽,故目标振幅起伏噪声的影响基本可以消除。 第二、圆锥扫描雷达的角误差信号以调制包络的形式出现,它的能量存在于上、下边频的两个频带内,而单脉冲雷达的角误差信息只存在于一个频带内。故圆锥扫描雷达接收机热噪声的影响比单脉冲雷达大一倍。单脉冲雷达的角跟踪精度比圆锥扫描雷达的要高一个量级,约为0.1-0.2密位。
单脉冲雷达理以及应用
单脉冲定向原理 对目标的定向,即测定目标的方向,是雷达的主要任务之一。单脉冲定向是雷达定向的一个重要方法。所谓“单脉冲”,是指使用这种方法时,只需要一个目标回波脉冲,就可以给出目标角位置的全部信息。根据从回波信号中提取目标角信息的特点,可以将单脉冲定向分为两种基本的方法:振幅定向法和相位定向法,分别见于下图。除了上述两种方法外,由它们合成的振幅—相位定向法(或称为综合法)也得到了广泛的应用。 图2-1 单脉冲振幅定向法 图2-2单脉冲相位定向法 2.1 振幅定向法 振幅定向法是用天线接收到的回波信号幅度值来进行角度测量的,该幅度值的变化规律取决于天线方向图以及天线的扫描方式。振幅定向法可以分为最大信号法和等信号法两大类,其中等信号法又可以分为比幅法和和差法。 如图所示,平面两波束相互部分交叠,其等强信号轴的方向已知,两波束中心轴与等强信号轴的偏角0θ也已知。假设目标回波信号来向与等强信号轴向的夹角为θ,天线波束方向图函数为F(θ),则两个子波束的方向图函数可分别写成 ()()()???-=+=θθθθθθ02 01)(F F F F (2-1) 两波束接收到的目标回波信号可以表示成:
()()()()()()???-==+==θθθθθθθθ022 011F K F K u F K F K u a a a a (2-2) 其中a K 为回波信号的幅度系数。 对于比幅法,直接计算两回波信号的幅度比值有: ()()()() θθθθθθ-+=0021F F u u (2-3) 根据上式比值的大小可以判断目标回波信号偏角θ的方向,再通过查表就可以估计出θ的大小。 对于和差法,由()θ1u 和()θ2u 可计算得到其和值()θ∑u 及差值()θ?u 分别如下: ()()()()()()()()()()()()???--+=-=-++=+=? ∑θθθθθθθθθθθθθθ00210021F F K u u u F F K u u u a a (2-4) 其中()()()θθθθθ-++=∑00)(F F F 称为和波束方向图; ()()()θθθθθ--+=?00)(F F F 称为差波束方向图。 若θ很小(在等强信号轴附近),根据泰勒公式可以将 ()θθ+0F 和()θθ-0F 展 开近似为: ()()()()()()()()()()()()???'-=+'-=-'+≈+'+=+θ θθθθθθθθθθθθθθθθθ002000002000F F o F F F F F o F F F 进一步可以得到: ()()()()???'≈≈? ∑θθθθθ0022F K u F K u a a (2-5) 归一化和差信号值可得: ()()()() υθθθθθθ='=∑?00F F u u (2-6) 其中()()00θθυF F '= 是天线方向图在波束偏转角0θ处的归一化斜率系数。
振幅和差单脉冲雷达
振幅和差单脉冲雷达振幅和差单脉冲雷达在自动测角中的应用 姓名: 学号: 2014-12-20 西安电子科技大学 信息对抗
摘要: 在雷达系统中,为了确定目标的位置,不仅需要知道距离参量,同时也需要知道目标的空间方位,为此需要知道目标的方位角和俯仰角。雷达测角的物理基础是电磁波在均匀介质中沿直线传播和雷达天线具有方向性。测角的方法可分为振幅法和相位法两大类。在雷达测角中,为了快速地提供目标的精确坐标值,要采用自动测角的方法。自动测角时,天线能自动跟踪目标,同时将目标的坐标数据传送到计算机中。在自动测角系统中,有一种典型的方式——单脉冲自动测角系统。单脉冲自动测角属于同时波瓣测角法,单脉冲雷达的种类很多,最常用的是振幅和差单脉冲雷达。 关键字:雷达自动测角系统振幅和差单脉冲雷达 一、单脉冲雷达 什么是单脉冲雷达? 单脉冲雷达是一种精密跟踪雷达。它每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。 单脉冲雷达通常有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类(本次只研究振幅比较法)。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。在军事上主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。 二、振幅和差单脉冲雷达 振幅定向法是用天线接收到的回波信号幅度值来进行角度测量的,该幅度值的变化规律取决于天线方向图以及天线的扫描方式。振幅定向法可以分为最大信号法和等信号法两大类,其中等信号法又可以分为比幅法和和差法。此次试验只研究和差式雷达。
单脉冲天线
第十三章单脉冲天线 一、引言 单脉冲雷达体制系统,主要用于高速目标的跟踪定位。如飞机、导弹、火箭、人造卫星的跟踪。单脉冲雷达系统中的天线称为单脉冲天线。单脉冲雷达天线要求产生一个主瓣的和波束,以及具有两个(或四个)主瓣的差波束,如下图13-1所示。差波束的两个峰值之间的最小值称为“零值”。和波束的作用是探测目标的距离(r)并行距离跟踪;差波束的作用是探测目标的方位角和俯仰角信息(,?θ)并行角跟踪。一个目标的距离信息r和角信息,?θ已知,则目标的空间位置就确定了。如果目标正好在和波束最大值方向,则差波束接收到的信号很弱(为零值);当目标移动时,则差波束接收到的信号由弱变强,则可利用差信号来驱动伺服机构,使天线在俯仰或方位上转动,始终使差波束的零值方向对准目标,从而实现跟踪。 图13-1单脉冲天线方向图 二、单脉冲天线组成。 在雷达应用中,单脉冲天线可采用阵列天线,也可采用反射面和单脉冲馈源组成。如果是后者,则馈源一般采用多个(4个)叭或者单口多模喇叭。形成差波束的关键是使用了比较器(和差器)。 三、分类。 根据比较回波信号的幅度和相位,单脉冲分为幅度单脉冲、相位单脉冲和幅相单脉冲,它们的主要区别在于天线。无论是幅度还是相位单脉冲,为了确定目标在某一平面的角度(方位、俯仰),都要求同时产生两个形状相同的波束。这里只讨论幅度单脉冲(比幅)。 四、工作原理。 为了说明问题,先考虑一个平面(俯仰面)内单脉冲技术的工作原理。
当一个横向偏焦的喇叭,置于抛面焦点附近时天线将产生一个偏离天线轴的 θ正比于偏焦距离x。为了获得两个对称于天线轴,并有波瓣,其波束偏移角 s θ的波瓣,可用两个对称于天线轴的横向偏焦喇叭来完成,如图13-2相同偏移角 s 所示。 图13-2 幅度比较单脉冲 若探测到一个目标,来自A方向,这时两波束收到的回波信号,相位相同,但幅度不等。两信号相减形成的差信号是目标方向的函数。这个差信号的大小,表示了目标偏离天线轴向角度的大小,差信号的正负,则表示目标偏向哪一边。由差信号驱动电机使天线转动而对准目标,则差信号为0。从而实现了跟踪。 一般的比幅单脉冲天线的馈源是由四个喇叭和比较电路构成的。假如上图为俯仰面的话,另两个喇叭则构成方位面。四喇叭馈源及比较器电路如图13-3所示。 图13-3 幅度比较单脉冲天线的馈源和比较器
单脉冲雷达角度跟踪技术研究
单脉冲雷达角度跟踪技术研究 【摘要】简单介绍了单脉冲雷达的特点及工作原理,重点分析了多部干扰机对单脉冲雷达的角度干扰问题,并对相干干扰和非相干干扰的干扰效果进行了讨论,指出两点源非相干干扰是实际工程中一种比较理想的干扰方式。 【关键词】单脉冲雷达、角度跟踪、相干干扰、非相干干扰 一、引言 对雷达进行干扰要对准雷达的四个系统:显示系统、距离跟踪系统、速度跟踪系统和角度跟踪系统。在雷达发展的早期,只要对前三个系统中的一个(或两个)系统进行有效地干扰,就可达到破坏雷达角跟踪系统正常工作的目的。现在随着新体制雷达的出现和抗干扰技术的不断提高,尤其是单脉冲雷达体制的出现,使很多干扰技术难以奏效。本文以振幅和差式单脉冲雷达为例,讨论了用多部干扰机对单脉冲雷达实施干扰的情况。 二、分析 1.单脉冲雷达 ◆定义 单脉冲雷达是指由单个回波脉冲即可获得目标空间角信息的雷达。 ◆特点 单脉冲雷达是一种精密跟踪雷达。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。美国、英国、法国和日本等国军队大量装备单脉冲雷达,主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。目前使用的单脉冲雷达基本上都实现了模块化、系列化和通用化,具有多目标跟踪、动目标显示、故障自检、维修方便等特点。 ◆分类 根据从回波中获取角信息的方式(测角法)不同,单脉冲雷达可分为振幅法(比幅)、相位法(比相)和综合法(振幅相位)3种。这3种测角法又可用3种角度鉴
别器(振幅式、相位式、和差式)中的任何一种来获得目标的角度信息,因此综合起来有9种形式的单脉冲雷达系统,其中以振幅和差式单脉冲雷达系统用的最多。通常分为有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类。 工作原理 单脉冲雷达每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。它具有圆锥扫描雷达所没有的优点:获得角误差信息的时间短(以微秒计算);不受回波振幅起伏变化的影响;测角精度高(0.1~0.5mil);测角支路抗幅度调制干扰(如回答式倒相干扰)的能力强。振幅和差式单脉冲雷达系统的基本工作原理:将两个比幅天线方向图所得的幅度不同的信号经过和差变换器之后,再把和信号(U∑ )、差信号(U△ )加到鉴相器得出差信号。 2 雷达角跟踪技术 2.1 信号处理和测量技术 PD采用一种合适的且可以适当改变的配置方式及数据处理算法,可成功的实现跟踪低仰角目标。假定一种处理算法,地面的反射系数应有一个确定的模型(如镜面反射和几何光学原理),重要的是要估计这样的算法偏离假定的反射模型的灵敏度如何。在一个真实系统中,这样的偏差肯定会发生。即使是光滑的镜面表面(理想的镜面反射),当雷达位于几倍天线直径大的该表面时,由物理光学原理即菲涅尔区,也需要校正。关键的问题是,在反射的雷达信号中有多少是未知量,要确定这些未知量,雷达需要测量的量是多少,很明显,在多路径效应下,未知数的数量会增加。雷达必须做更多的测量才能获得反射平面的信息以鉴别目标的真实仰角。但是更多的工作是需要找到最优的算法,需要确定它们对不同反射系数模型的灵敏度。
Ka波段单脉冲平面和差网络和天线的研究
Ka波段单脉冲平面和差网络和天线的研究 1 引言从20 世纪40 年代后期开始,毫米波单脉冲雷达技术逐步得到发展和应用,尤其是在航空和导弹防御系统中,毫米波单脉冲雷达发挥着重要的作用。毫米波单脉冲天线馈电网络是毫米波雷达的关键技术之一。传统的和差网络由魔T 构成,但结构过于庞大,不易实现平面化、集成化,并且成本较高。随着微带印刷技术的不断发展,微带结构的和差网络被广泛应用,但是毫米波波段的微带电路的损耗很大,并且功率承受能力较低。本文设计的Ka 波段平面和差网络采用波导缝隙耦合结构,具有结构简单、成本低、损耗小、各端口幅度和相位一致性好等优点。 2 和差网络模型及工作原理最早的缝隙耦合式波导和差器是由H.A.Bethe 提出的,它的原理是:在两根平行的矩形波导公共窄壁上开一个耦合裂缝构成 90°混合电桥,如图1 所示。根据3dB 电桥原理,通过改变耦合裂缝的长度可以调整两波导间的耦合度,使直通端口和耦合端口的输出功率相等。由于耦合端口的电场相位滞后直通端口的电场相位90°,所以直通端口和耦合端口存在90°的相位差,可以在输入端口增加四分之一波长的波导段消除相差。图1 中port1 和port4 为输入端口,port2 为和信号输出端口,port3 为差信号输出端口。 图1 缝隙电桥(左)及和差器构成原理图(右) 在图1 所示的结构中,设从输入端口输入电场幅度为E 的TE10 波,其余端口均接匹配负载。选取合适的波导尺寸,使主副波导耦合段内只能传输TE10 和TE20 两种模式的电磁波。根据叠加原理,输入端的电磁波等效于在port1 和port4 同时输入电场幅度为E/2 的偶模波和奇模波的叠加。设波导宽壁的内
单脉冲自动测角系统在导引头中的应用
雷达原理大作业——单脉冲自动测角系统在导引头中的应用 学院:电子工程学院 完成人及学号:
杨超() 王东旭() 韩孟洲() 程荣() 谭宗欣() 于振浩()任课教师:饶鲜
目录: 一、单脉冲自动测角系统简介- 4 - 1.单脉冲雷达- 4 - 2.自动测角系统- 4 - 3.单脉冲自动测角系统- 4 - 二、单脉冲自动测角原理- 5 - 1.振幅定向法- 5 - 2.相位定向法- 7 - 三、单脉冲自动测角系统的特点- 7 - 1.角度跟踪精度- 7 - 2.天线增益和作用距离- 8 - 3.角度信息的数据率- 8 - 4.抗干扰能力- 8 - 5.复杂程度- 8 - 四、单脉冲自动测角系统的仿真- 9 - 五、单脉冲雷达的应用- 12 - 六、总结- 13 -
一、单脉冲自动测角系统简介 1.单脉冲雷达 单脉冲雷达是一种精密跟踪雷达。它每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。 2.自动测角系统 在火控系统中使用的雷达,必须快速连续地提供单个目标(飞机、导弹等)坐标的精确数值,此外在靶场测量、卫星跟踪、宇宙航行等方面应用时,雷达也是观测一个目标,而且必须精确地提供目标坐标的测量数据。 为了快速地提供目标的精确坐标值,要采用自动测角的方法。自动测角时,天线能自动跟踪目标,同时将目标的坐标数据经数据传递系统送到计算机数据处理系统。 和自动测距需要有一个时间鉴别器一样,自动测角也必须要有一个角误差鉴别器。当目标方向偏离天线轴线(即出现了误差角ε)时,就能产生一误差电压。误差电压的大小正比于误差角,其极性随偏离方向不同而改变。此误差电压经跟踪系统变换、放大、处理后,控制天线向减小误差角的方向运动,使天线轴线对准目标。 用等信号法测角时,在一个角平面内需要两个波束。这两个波束可以交替出现(顺序波瓣法),也可以同时存在(同时波瓣法)。前一种方式以圆锥扫描雷达为典型,后一种是单脉冲雷达。 3.单脉冲自动测角系统 单脉冲自动测角属于同时波瓣测角法。在一个角平面内,两个相同的波束部分重叠,其交叠方向即为等信号轴。将这两个波束同时接收到的回波信号进行比较,就可取得目标在这个平面上的角误差信号,然后将此误差电压放大变换后加到驱动电动机,控制天线向减小误差的方向运动。因为两个波束同时接收回波,故单脉冲测角获得目标角误差信息的时间可以
振幅和差单脉冲雷达
[文档标题] [文档副标题] 姓名: 学号: 摘要: 在雷达系统中,为了确定目标的位置,不仅需要知道距离参量,同时也需要知道目标的空间方位,为此需要知道目标的方位角和俯仰角。雷达测角的物理基础是电磁波在均匀介质中沿直线传播和雷达天线具有方向性。测角的方法可分为振幅法和相位法两大类。在雷达测角中,为了快速地提供目标的精确坐标值,要采用自动测角的方法。自动测角时,天线能自动跟踪目标,同时将目标的坐标数据传送到计算机中。在自动测角系统中,有一种典型的方式——单脉冲自动测角系统。单脉冲自动测角属于同时波瓣测角法,单脉冲雷达的种类很多,最常用的是振幅和差单脉冲雷达。 关键字:雷达 自动测角系统 振幅和差单脉冲雷达 一、 单脉冲雷达 什么是单脉冲雷达? 单脉冲雷达是一种精密跟踪雷达。它每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。 单脉冲雷达通常有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类(本次只研究振幅比较法)。它有较 高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。在军事上主要用 于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。 2014-12-20 信息对抗
极化对单脉冲天线差波束指向的影响分析
第32卷第11期2010年11月 现代雷达 ModernRadar V01.32No.1l Nov.2010 ?天馈伺系统-中图分类号:TN820文献标志码:A文章编号:1004—7859{2010)11—0070—03极化对单脉冲天线差波束指向的影响分析 刘志惠,孙磊 (南京电子技术研究所,南京210039) 摘要:单脉冲雷达天线的差波束指向和灵敏度通常受2个通道的幅相不平衡性影响,通过仿真计算和测试,在某些情况下。天线极化形式也会对差波束指向带来影响,例如斜45。极化。文中对几种典型模型进行了仿真、对比,并结合测试情况,分析了这种现象的成因、产生条件、对雷达性能的影响,最后给出了几种解决方案。 关键词:单脉冲雷达;差波束指向;极化 Polarization7SImpactonOffsetBeamDirectionalityof theMonopulseAntenna LIUZhi—hui,SUNLei (NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China) Abstract:Theoffsetbeamdirectionalityandsensitivityofthemonopulseradarfiremainlyinfluencedbythegain—phaseimbalanceofthetwochannels.Basedonsimulationandtest,theoffsetbeamdirectionalityCallbealsoinfluencedbythepolarizationofthe antennainsomesituations,suchillsthe45。inclinedpolarization.Inthispapersometypicalmodelsaresimulatedand compared. The genesis,conditionsandthe influenceonradarareanalyzed.Somesolvingmethodsareintroducedintheend.Keywords:monopulseradar;offset beamdirectionality;polarization 0引‘言 单脉冲雷达天线常用的极化形式有水平线极化、 垂直线极化、圆极化¨。4J,某些情况下还会用到斜45。 极化,比如在无源探测领域,经常会用到450斜极化。 对于水平极化和垂直极化,差波束指向主要受幅度和 相位的不平衡性影响。对45。斜极化,差波束指向除 了受幅度和相位的不平衡性影响外,在偏离法平面的 切面上,天线的极化形式还会带来固有的指向偏差,即 空间的三维差零深面不再是呈水平或垂直方向,而是 存在一个小角度的倾斜,倾斜方向和倾斜程度直接受 天线单元在阵中所表现的辐射特性决定。在天线的俯 仰法平面上,差波束指向没有偏差,但偏离俯仰法平面 时,指向将出现偏差,且偏差程度随俯仰方向偏离法平 面角度的增大而增大。 l极化形式对差波束指向影响的仿真分析 对一个2×2排列的振子阵列的方位差特性进行 了仿真计算。 如图1所示,垂直极化单元的方位差零深面呈垂 直方向。如图2所示,斜450极化单元阵列差零深面 则有一个小角度的倾斜,且零深变浅。经过分析,我们 通信作者:刘志惠 收稿日期:2010-06-20??-——70?————Emall:lzh_rat@163.com 修订日期:2010-09-28’ 发现有2个因素导致差零深面的倾斜:(1)阵列单元 的波瓣图不等化,如图3所示:振子单元H面波瓣比E 面波瓣宽,因此在偏离俯仰面法平面的A点,单元l 的场弱于单元2的场,导致在该处的场虽然在相位上 反相,但幅度不同,不能完全抵消,而在离单元2稍远 的B点出现了合成的最小值,但由于相位也出现了偏 差,因此差零深也相应变浅。(2)在阵中环境中,天线 单元的等效相位中心发生了偏移,从而导致差零深面 出现倾斜,如图4所示。 图1垂直极化单元及其波瓣图 差波束指向角的偏差程度随俯仰方向偏离法平面 角度的增大而增大,并受上述2个因素综合影响,当某 个因素占优势时,差零深面呈现相应的倾斜方向。在 该计算频点上,波瓣的不等化的因素占优势,差零深面 呈现如图3所示的倾斜方向。而且当俯仰面波束边窄 (此处我们以俯仰面单元数量的增大来实现)时,差零 深面的倾斜角也增大,如图5所示。 万方数据
单脉冲压缩雷达原理
单脉冲角度跟踪技术研究 学生尤阳 班级 0209991班 学号 02099043 专业电子信息工程 学院电子工程学院 西安电子科技大学 2012年5月
一、引言 单脉冲角跟踪系统的方案包括三通道、双通道、单通道单脉冲等。在跟踪系统精度要求不高的系统中,采用单通道单脉冲跟踪系统的设备越来越多,例如业务测控站、遥感地面站、卫星侦察信号接收站、遥测地面站等。较常用的实现方案是在常规双通道的基础上,用低频调制信号对差信号进行四相调制后再与和信号合并,变成一个通道输出,其合成信号只需经包络检波即可得到误差电压。由于进行了通道合并,这种体制不存在和、差通道合并后的相位和增益不一致问题不需要调整通道的相位除低噪放大器(LNA)外所有的设备可以安装在机房,大大提高了设备的可靠性、使用性和维护性,同时减少了设备,造价也大大降低。 二、系统工作原理及误差电压的提取 为了确保系统的G / T 值,应考虑在LNA后进行和、差信号的合成。为了阐明其物理概念,将双通道单脉冲合成为单通道单脉冲的跟踪系统方框图进行简化。简化后的框图如图 1 所示。 图1 跟踪系统框图 设从天馈来的信号为单频信号,在分析时假定天线和、差信道在接收频带内辐射特性保持不变,而且和、差信道及从天线的来波均为理想圆极化波。馈源端口输出和信号的瞬时值为 差信号由方位与俯仰差信号相位正交合成得到为 式中μ为差斜率,A为目标在方位上偏离电轴的角度,E 为目标在俯仰上偏离电轴的角度。 差信号的矢量关系为A = θcosФE = θs i nФ 图 2 双通道单脉冲合成矢量图
由图2,可将ed 变换为 式中Am μθ 为差信号的幅度,其中θ =B A+ 22;φ = tg -1 E / A为差路合成载波的相位,它与A、E 的比例大小有关,可见误差信号包含在幅度Am μθ 和相位φ 之中。 1. 单通道单脉冲的合成跟踪接收系统采用单通道时,和、差信号必须以适当的方式合成,目的是合成后的信号能在终端解调出角误差信息。通常在和、差信号合成前,先对差信号进行四相调制,再与和信号合成。 和、差信号分别经低噪声放大K E 、K ? 后为 差信号经四相调制后为 其中,φ为和、 差信号的相对相位差β(t)周期为 t4 =1/ Ω的信号调相, 在四相调制时有 ~t 调制后的差信号经一定向耦合器与和信号合成,其合成信号为 式中 M 为定向耦合器的耦合系数,一般取 6 ~ 9 dB。 2. 合成信号的解调和误差电压的提取 合成信号经下变频和放大后,频率仍记作ω,将合成信号变换后得:
某型单脉冲雷达跟踪不稳定分析
某型单脉冲雷达跟踪不稳定分析 单脉冲雷达是一种精密测量雷达,主要用于目标识别、精密跟踪测量、火箭和卫星跟踪、导航、地图测绘等,其跟踪是否稳定对于数据获取的精度极为重要,对不稳定跟踪数据进行分析,对于发现解决设备问题起到重要作用。 标签:雷达;跟踪;数据分析 1引言 本论文主要对雷达跟踪不稳定数据进行分析,从而发现设备隐患,对问题解决起到定位作用。在某次跟蹤信标球过程中,开展了C跟踪加偏试验。方位或俯仰单独加偏2mil,方位和俯仰均出现了明显的跟踪抖动现象(随机发散),统计误差电压以1V为中心,在±0.5V范围内随机跳动,取消加偏跟踪,天线跟踪恢复稳定,加偏跟踪误差电压趋势见图1。随后开展光跟加偏试验,现象与主跟加偏基本一致。 2数据分析 以以往跟踪数据作为参考,加偏跟踪误差电压趋势见图2,加偏跟踪状态与正常跟踪状态误差电压幅度相当。本次加偏跟踪时偏置电压随机抖动幅度明显比以往大,且方位/俯仰单独加偏会影响俯仰/方位误差电压的输出。通过多次加偏跟踪数据分析比对,可以说明雷达存在跟踪不稳定问题。 3问题原因分析 场放以下引起天线跟踪加偏抖动可能的原因主要有3个:一是伺服及天线结构问题,二是接收馈线幅相不平衡问题,三是接收通道噪声过大问题。针对这三个原因,做了以下排查工作。 3.1针对伺服天线结构问题开展的排查 ①施放标定求,微光电视四个象限光学加偏2mil跟踪,天线跟踪稳定。②跟踪天宫1号过境目标,S信号四个象限加偏2mil跟踪,天线跟踪稳定。由此可以排除伺服及天线结构问题。 3.2针对接收馈线幅相不平衡问题开展的排查 ①对幅相一致性进行标定,正常。标定结果与之前保持不变,但跟踪加偏抖动现象仍然存在,排除幅相标定错误问题。②使用模拟器定向灵敏度测试功能,长期观察差通道幅度和相位变化情况,均正常,而且四象限加偏时角误差输出稳定无跳变。由此可以初步排除场放以下接收馈线幅相问题。
单脉冲雷达的改进方法
收稿日期225 作者简介刘才斌(2 ),男,湖北公安人,硕士、副教授, 主要研究方向雷达教学与研究。 文章编号:1002206402(2008)增刊20027202 单脉冲雷达的改进方法 刘才斌,王大鹏,张仲华 (武汉军械士官学校,湖北 武汉 430075) 摘 要:单脉冲体制的雷达以其在测角、跟踪方面的优越性,现在被广泛应用于各电子侦察部(分)队。但该体制也由于和、差通道的幅相特性的不一致,产生了测角误差,进而影响了系统的测角及跟踪性能。某型雷达由于在接收机中采用幅度、相位实时自动调整系统,使幅相一致性得到明显的提高,从而使测角误差大大减小。 关键词:单脉冲体制,测角误差,跟踪特性中图分类号:TP 391 文献标识码:A The Si n gle Pulse System Ra da r M ea sur es the Ca pe an d Follows the I m pr ovem en t of the Character ist i c L I U C ai 2bin,W AN G D a 2peng,ZHAN G Zhong 2hua (W uha n O rdnancy N on 2co mm issioned Of f icer A ca de my of PL A ,W uha n 430075,China ) Abstra ct:T he radar of the single pulse syste m th ink s it s in the asp ect s of m easuring t he Cap e and fo llow of super i o r ,now w a s p robed a brigade in each elect ron ics by the ex tensive appl ica t i on 1B u t that system too because of and,differ an inconfo r m ity fo r m utual ly characteristic of the pa ssage,produce to m ea sure the Cap e erro r m argin ,then affected the system m easure the C ape and fol l ow the funct ion 1Som e type rada r becau se of adop t ing the range in rece ive m achine ,m u tua lly an exa ltat ion fo r solidly hour au tom a t ic adjustm ent system ,m aking first m utually the consistency ge ts obvi ously,from but m ake m ea sure the Cap e erro r m argin to let up consum edly . Key words :the single p ulse syste m m easures ,m easure the e rror m argin of the angle ,i mp rovem ent m ethod 引 言 在战场侦察系统中使用的雷达,必须快速且准确地提供单个目标坐标(距离、方位)的精确数值并跟踪目标。 雷达测角的物理基础是电波在均匀介质中传播的直线性和雷达天线的方向性。为了快速地提供目标的精确值,要采用自动测角的方法。当目标方向偏离天线轴线(即出现了 误差角Ε )时,就能产生一误差电压,误差电压的大小正比于误差角Ε,其极性随偏离方向不同而改变。此误差电压经跟踪系统变换、放大、处理后,控制天线向减小误差角的方向运动,使天线轴线对准目标[1]。 图1 雷达和差波束图 单脉冲测角就是确定角度误差所必须的全部信息在单脉冲的基础上获得,单脉冲天线接收的目标回波信号经多模馈源后,在和、差支路中形成和 (2)、差(?)信号。雷达和差波束 图如图1所示。和波束回波信号主要用于作为相位基准以确定信号正负号,差波束回波信号主要用于测角。当目标在波束 (和波束)中心时,左右馈源收 到的回波信号相同,经多模馈 源后和(2)信号最大,差(?)信号为零;当目标偏离和波束中心时,单脉冲天线接收到的回波差(?)信号大小及差(?)信号极性符号代表了目标偏离波束中心的程度和方向。雷达计算机软件据此计算出代表方位误差大小的值,送至伺服系统 V o l .33,Sup p l em ent A p ril,2008 火力与指挥控制 Fire Co nt ro l and Comm and Co n tro l 第33卷增 刊 :2007101:1972:
单脉冲角度
“雷达原理” 作业报告 题目关于单脉冲角度跟踪在雷达系统中的 应用的研究 学生 年级 班级 学号 专业 学院
摘要介绍了单脉冲雷达角跟踪系统的组成及比幅度单脉冲角跟踪原理,同时置零法原理,并对同时置零法进行了计算机仿真。 引言 单脉冲测角,顾名思义即只需要一个回波脉冲,就可以给出目标角位置的全部信息。它不仅能够抑制幅度调制的干扰信号,并且具有较强的跟踪干扰源的能力,成为目前雷达普遍采用的测角方式。 1脉冲雷达角跟踪系统的组成及比幅度原理 单脉冲雷达角跟踪系统一般由扫描天线以及信号变换(混频、中放等)、相敏检波和伺服系统组成,其系统的组成如图l所示。其中和差网络完成和、差处理,形成和差波束。信号变换用以变换信号参数之间的相位关系。相敏检波形成角跟踪误差信号。伺服系统根据角跟踪误差信号控制天线的转动。 图1 角跟踪系统组成框图 基本工作原理为:天线接收到的回波信号经“和差网络”后形成包含目标角误差信号的高频信号,经“信号变换”(包括混频、中放等)后送至“相敏检波”电路,检出角误差信号。最后,伺服系统控制天线转动,直到角误差为0(天线电轴对准目标)。 2 比幅度单脉冲角跟踪原理 角误差信号。雷达天线在一个角平面内有两个部分重叠的波束, 如图1 所示, 振幅和差式单脉冲雷达取得角误差信号的基本方法是将这两个波束同时收到的信号进行和、差处理, 分别得到和信号与差信号。其中差信号即为该角平面内的角误差信号。设和信号为EΣ,其振幅为两信号振幅之和, 相位与到达和端的两信号相位相同,且与目标偏离天线轴线的方向无关。 假定两个波束的方向性函数完全相同, 设为F(θ), 两波束接收到的信号电压振幅为 E1、E2,并且到达和差比较器Σ 端时保持不变, 两波束相对天线轴线的偏角为δ, 则对于方向θ的目标,和信号的振幅表达式如下:
舰载单脉冲跟踪雷达数学建模与仿真
第28卷 第6期 指挥控制与仿真 V ol.28 No.6 2006 年12月 Command Control & Simulation Dec.2006 文章编号 1673-3819(2006)06-0005-04 舰载单脉冲跟踪雷达数学建模与仿真 李素民 1 李 鲲 2 1 南京航空航天大学江苏 南京 2100162华中光电技术研究所 湖北 武汉 430074 摘 要根据典型舰载单脉冲跟踪雷达的组成及工作原理介绍一种舰载单脉冲跟踪雷达仿真建模方法重点描述了仿真原理及仿真模型组成介绍了雷达信号特性仿真雷达伺服系统仿真雷达信号处理系统仿真 等关键环节的数学仿真模型 结合仿真软件功能需求 给出了软件结构软件运行流程等仿真软件设计要点 关键词 跟踪雷达仿真数学建模软件设计 中图分类号E974 文献标识码 A Modeling and Simulation for Shipborne Mono-Pulse Tracking Radar LI Su-min 1, LI Kun 2 (1. Nanjing University of Aeronautic s and Astronaution, Nanjing 210016, China 2. Opti-Electronic Research Institute, Wuhan 222006, China) Abstract: A method for modeling and simulation is introduced in this paper in the basis of components and working principles of typical shipborne mono-pulse tracking radar. The simulation principles and the mathematical model is described, and then, the key models of simulations such as signal characteristics, servo systems and signal process system are followed. Finally, considering the requ irements of software function for simulation, the key points of design for software configuration and software flow chart are presented. Key words: shipborne mono-pulse tracking radar mathematical models simulation software 仿真技术是以相似原理 系统技术信息技术以及仿真应用领域的有关专业技术为基础以计算 机系统与应用有关的物理效应设备及仿真器为工 具 利用模型对系统进行研究的一门多学科的综合 性的技术 在武器装备研制的各个阶段 系统仿真都能发挥其特有的作用 可行性论证阶段 通过数 学仿真可研究武器系统战术技术指标的合理性和技 术方案的可行性 方案论证阶段 通过数学仿真或 半实物仿真比较和选择武器系统总体方案验证技 术方案和关键技术攻关成果并选定总体和分系统 的主要性能参数 系统设计阶段 通过仿真验证系 统设计的正确性合理性 [1] 雷达是一种目标跟踪探 测设备 它利用目标对电磁波的反射现象来发现目 标并测定其位置与其它探测设备相比 雷达探测 距离远测量精度高基本上不受昼夜和气象条件 限制 因此是舰载武器系统必备的目标跟踪探测设备 而单脉冲跟踪雷达是一种最常见的舰载跟踪雷 达类型为了给舰载武器系统的研究提供更好的仿真支持 建立高逼真度的仿真环境 对舰载单脉冲 跟踪雷达仿真技术的研究显得非常重要 收稿日期2006-07-16 修回日期2006-08-02 作者简介 李素民1965-女河南安阳人 研究员 研究领域为系统建模与仿真技术 李 鲲 1977-女 硕士研究生 1 仿真建模 仿真是通过建立系统模型数学模型物理效 应模型或数学物理效应模型并对所研究的实际或设想的系统进行试验研究的方法或过程典型的系统仿真过程包括系统模型建立仿真模型建 立 仿真程序设计模型确认仿真试验和数据分 析处理等由此可见仿真技术的核心是模型物理的数学的或非数学的的建立 验证和试验运 行技术 1.1 仿真对象简介 本文研究的仿真对象是典型舰载单脉冲跟踪雷达采用比幅单脉冲工作体制天线类型为卡塞格 伦单脉冲天线具有脉间频率捷变MTD 信号处理 等抗干扰技术 在目标指示引导下雷达能够迅速地捕获跟踪目标 送出目标定位数据和误差数据能有效精确地跟踪掠海飞行的反舰弹道低空/超低空飞机以及海上舰艇目标具有较强的抗干扰能力 可在复杂的电子环境中稳定精确地跟踪目标 1.2 仿真建模方法 仿真模型的建立方法有多种机理建模方法辨识建模方法模糊建模方法神经网络建模方法和模糊神经网络建模方法等[2]我们采用机理建模方法建立舰载单脉冲跟踪雷达仿真模型 万方数据
雷达原理—单脉冲角度跟踪技术研究报告
“单脉冲跟踪技术” 作业报告 题目关于单脉冲角度跟踪技术研究 学生李林森 年级 2009级 班级 020931班 学号 02093014 专业信息对抗技术 学院电子工程学院 西安电子科技大学 2011年11月 引言 自第二次世界大战开始,雷达就应用在军事方面,从尖端武器到常规武器,从防御性武器到进攻性武器有它的身影。随着无线电技术的进步,现代雷达具有多种功能,它的作用已经不能被其字面意义简单的概括出来,现代雷达不但能够截获、探测、侦察目标,测量目标的距离、方位、仰角、速度,确定目标的形态,还能实现测绘、导航、监视、边扫描边跟踪等一系列新功能。数字技术的飞速发展和电子计算机的问世,
使雷达的结构组成和设计发生了根本性的变化,仿真技术也应世迅速发展起来。采用这些技术后,雷达的工作性能大为提高,测量精度也提高了一个数量级以上。近年来,雷达作为一种探测目标的重要工具,在军事和民用领域发挥越来越重要的作用。其主要任务是在存在噪声、杂波与干扰的背景中检测并跟踪、测量来自空中、地面或水面上的有用目标。随着电子器件技术和计算机技术的迅速发展,各种雷达信号处理技术的理论与应用研究成为一大热门领域和关键课题,雷达信号处理主要围绕对目标信号的变换、检测、跟踪、识别以及威胁判断等问题而进行,其中对目标的精确方位角测量是目标信号处理的一个重要环节,同时也是信号处理中的一个关键问题。单脉冲体制雷达是一种在圆锥扫描等雷达体制之后发展起来的比较先进的雷达体制,它与圆锥扫描等比较“老”的雷达体制的区别在于采用了不同的定向原理,具有更高的定向精度,因而在航空以及军事等领域有广泛的应用。使用单脉冲定向法,只需要一个回波脉冲,就可以给出目标角位置的全部信息,这也是“单脉冲”定向这一术语的来源。因为单脉冲雷达只用一个脉冲定向,所以回波信号的幅度起伏不会对角坐标的测量精度产生显著的影响。单脉冲定向是依靠多路接收技术实现的,它是用几个独立的接收支路来同时接收目标信号的回波信号,然后再将这些信号的参数加以比较。通常,对每个定向坐标平面都要用两个独立的接收支路:方位平面内两个支路,俯仰平面内两个支路。而以前广泛应用的圆锥扫描法、线性扫描法等都是用单支路(通道)来定向的,目标的角信息体现在回波信号的振幅调制中,所以这种定向法对于因目标有效反射面积随机变化而产生的振幅起伏是很敏感的。这也是限制这些方法使用的最严重的缺点。。因此,它不仅成为军事上必不可少的电子装备,而且广泛应用于社会经济发展(如气象预报、资源探测、环境监测等)和科学研究(天体研究、大气物理、电离层结构研究等)。星载和机载合成孔径雷达已经成为当今遥感中十分重要的传感器。以地面为目标的雷达可以探测地面的精确形状。其空间分辨力可达几米到几十米,且与距离无关。雷达在洪水监测、海冰监测、土壤湿度调查、森林资源清查、地质调查等方面显示了很好的应用潜力。其中,单脉冲角度跟踪技术是雷达技术中占有重要地位,下面我们就来浅谈一下这项技术 第一节简介