土工试验规程(sl237-1999)学习分类
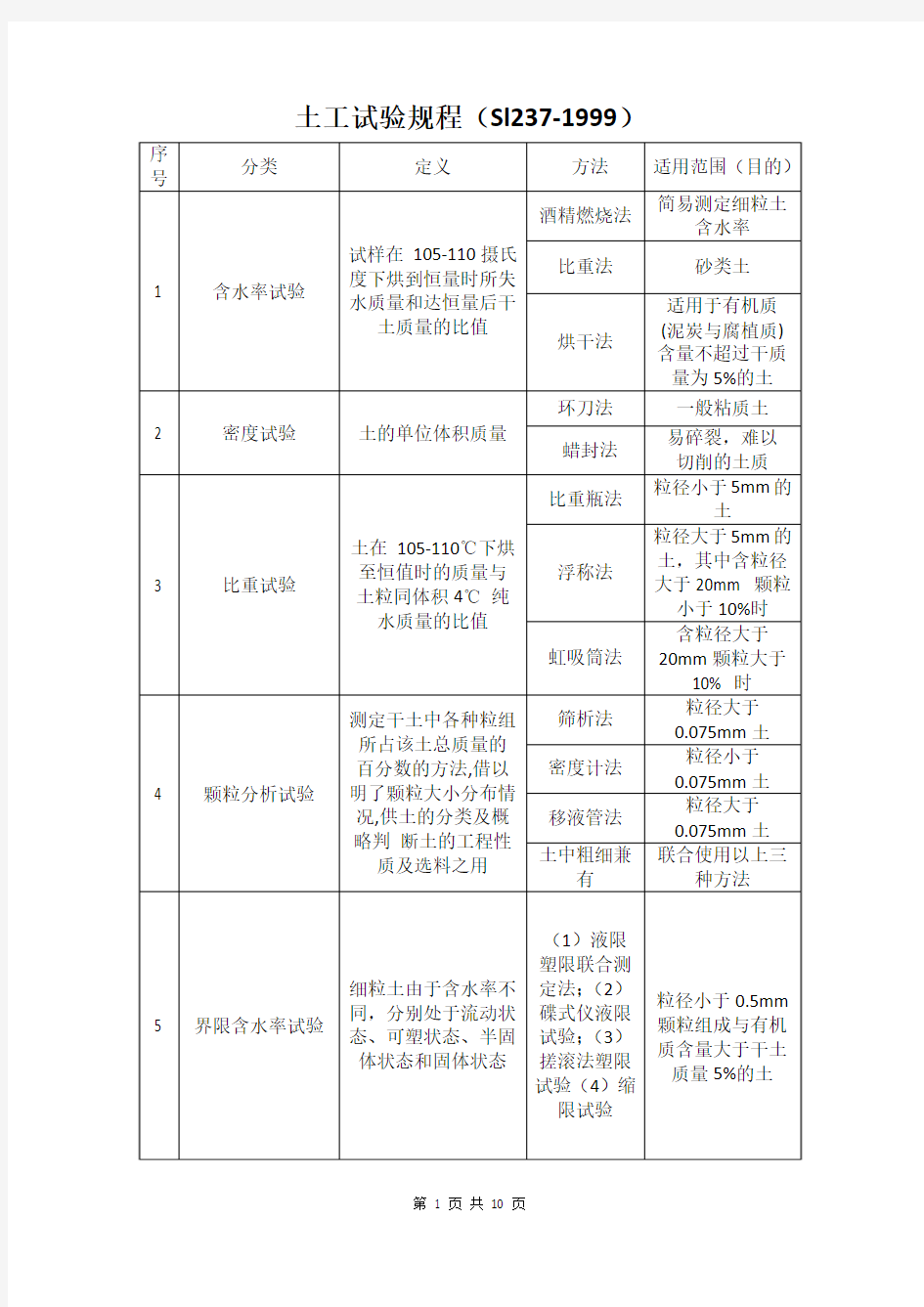

土工试验规程(Sl237-1999)
英国爱丁堡大学宿舍介绍,选择攻略bynegative
英国爱丁堡大学宿舍介绍,选择攻略bynegative 住宿问题是很多来英国留学的同学都非常关注的问题,今天我就来说说爱丁堡大学宿舍的方方面面吧,供同学们参考,先注明,这些信息每学期都可能发生变化喔,所以仅供参考。 爱丁堡大学的宿舍政策 如果你是一年级本科新生,或者是来自非欧盟国家的本科、研究生的第一年,只要你满足一下条件,你将获得爱丁堡大学的guaranteedaccommodation:确保您在今年7月之前申请 确保您在今年8月前拿到unconditionalfirmoffer 您在以前不生活在爱丁堡(这不是废话吗……) 是全日制学生,而且在今年九月入学(更加废话,不入学我申宿舍干嘛去?!) 爱丁堡大学的包饭宿舍 位置: 本大学提供的所有包饭宿舍均在处于HolyroodParkRoad的PollockHalls(PH)宿舍区。该宿舍区距离GeorgeSquare(GS)步行大约20分钟(不太远,权当早起锻炼,每天锻炼半小时,健康工作五十年,幸福生活一辈子啊,听话),步行至KingsBuildings(KB)大约需要30分钟。而这个宿舍区恰好处在Arthur'sSeat(一座死火山,妈妈呀,火山-_-……还亚瑟的宝座呢……)旁边,有很好的景致(火山喷发造成的?!)而且你能很容易找到回家的路(我彻底的无语了,火山,哈) 如果你分配到包饭宿舍,您将被安置在下面的houses中: *Chancellor'sCourt(有ensuit) *Baird *Ewing *Grant *Holland(有ensuit) *Lee *Masson(有ensuit) *Turner *JohnBurnettHouse(最新的,也是为研究生提供包饭宿舍的区域) 餐食 每周五至周六供应早餐和晚餐,周末则供应brunch和晚餐。开饭时间,我记得应该是:早餐7:45到10点(真好,不像我现在那个破学校,8点就没了),晚餐5:00到7:30,周末brunch11:30到下午2:00。就食物的质量来讲,相对于这么大规模的制作还是不错的。 比如早餐,你可以选择培根、鸡蛋、beans、香肠、hashbrowns(啥米东东?!)、黑白吐司(应该是全麦和普通土司),黄油和果酱(不抹怎么吃土司?!!)、pancakes和糖浆、面包、各式玉米片(Java的最爱的说……玉米片+蜂蜜)、羊角面包(话说抹着黄油很好吃)、燕麦粥(呃……)普通水果(苹果、橙子、香蕉,那特种水果是啥?我这亚热带来的人香蕉不能满足我的胃口,灭哈哈哈……)、果汁、酸奶和梅干(应该是扔在酸奶里边一块吃的) 插一句,话说这英式早餐,还真的不能随便乱吃,这么多肉和油腻的,吃了早饭就甭吃午饭了吧……不然一年以后,一个人变俩。
分类器训练
一、简介 目标检测方法最初由Paul Viola [Viola01]提出,并由Rainer Lienhart [Lienhart02]对这一方法进行了改善。该方法的基本步骤为:首先,利用样本(大约几百幅样本图片)的 harr 特征进行分类器训练,得到一个级联的boosted分类器。 分类器中的"级联"是指最终的分类器是由几个简单分类器级联组成。在图像检测中,被检窗口依次通过每一级分类器,这样在前面几层的检测中大部分的候选区域就被排除了,全部通过每一级分类器检测的区域即为目标区域。 分类器训练完以后,就可以应用于输入图像中的感兴趣区域(与训练样本相同的尺寸)的检测。检测到目标区域(汽车或人脸)分类器输出为1,否则输出为0。为了检测整副图像,可以在图像中移动搜索窗口,检测每一个位置来确定可能的目标。为了搜索不同大小的目标物体,分类器被设计为可以进行尺寸改变,这样比改变待检图像的尺寸大小更为有效。所以,为了在图像中检测未知大小的目标物体,扫描程序通常需要用不同比例大小的搜索窗口对图片进行几次扫描。 目前支持这种分类器的boosting技术有四种: Discrete Adaboost, Real Adaboost, Gentle Adaboost and Logitboost。 "boosted" 即指级联分类器的每一层都可以从中选取一个boosting算法(权重投票),并利用基础分类器的自我训练得到。 根据上面的分析,目标检测分为三个步骤: 1、样本的创建 2、训练分类器 3、利用训练好的分类器进行目标检测。 二、样本创建 训练样本分为正例样本和反例样本,其中正例样本是指待检目标样本(例如人脸或汽车等),反例样本指其它任意图片,所有的样本图片都被归一化为同样的尺寸大小(例如,20x20)。 负样本 负样本可以来自于任意的图片,但这些图片不能包含目标特征。负样本由背景描述文件来描述。背景描述文件是一个文本文件,每一行包含了一个负样本图片的文件名(基于描述文件的相对路径)。该文件必须手工创建。 e.g: 负样本描述文件的一个例子: 假定目录结构如下: /img img1.jpg img2.jpg bg.txt 则背景描述文件bg.txt的内容为: img/img1.jpg img/img2.jpg 正样本 正样本由程序createsample程序来创建。该程序的源代码由OpenCV给出,并且在bin目录下包含了这个可执行的程序。 正样本可以由单个的目标图片或者一系列的事先标记好的图片来创建。 Createsamples程序的命令行参数:
液位计的种类、原理及优缺点
液位计的种类、原理及优缺点 磁性浮子液位计 根据浮力原理和磁性耦合作用研制而成。当被测容器中的液位升降时,液位计本体管中的磁性浮子也随之升降,浮子内的永久磁钢通过磁耦合传递到磁翻柱指示器,驱动红、白翻柱翻转,当液位上升时翻柱由白色转变为红色,当液位下降时翻柱由红色转变为白色,指示器的红白交界处为容器内部液位的实际高度,从而实现液位清晰的指示。 可以做到高密封,防泄漏和适用于高温、高压、耐腐蚀的场合。对高温、高压、有毒、有害、强腐蚀介质更显其优越性。 与介质直接接触,浮球密封要求要严格,不能测量粘性介质。磁性材料如退磁易导致液位计不能正常工作 磁性翻板(柱)式液位计 与上同 与上同 翻板容易卡死,造成无法远传指示。磁性材料如退磁易导致液位计不能正常工作。 电磁波雷达液位计(导波雷达液位计) 雷达液位计采用发射—反射—接收的工作模式。雷达液位计的天线发射出电磁波,这些波经被测对象表面反射后,再被天线接收,电磁波从发射到接收的时间与到液面的距离成正比,关系式如下: D=CT/2(D:雷达液位计到液面的距离C:光速T:电磁波运行时间) 雷达液位计记录脉冲波经历的时间,而电磁波的传输速度为常数,则可算出液面到雷达天线的距离,从而知道液面的液位。
不需要传输媒介,不受大气、蒸气、槽内挥发雾影响的特点,能用于挥发介质的液位测量。采用非接触式测量,不受槽内液体的密度、浓度等物理特性的影响。 价格昂贵。仪表需要设置的参数较多,一旦出现问题,通常很难查出是什么原因造成的。如果天线本身不慎沾上介质会报错。如有结晶结冰现象会报错,需加热保温处理,并清理天线。最初安装需要是空仓,即空料位? 超声波液位计 超声波液位计是由微处理器控制的数字物位仪表。在测量中脉冲超声波由传感器(换能器)发出,声波经物体表面反射后被同一传感器接收,转换成电信号。并由声波的发射和接收之间的时间来计算传感器到被测物体的距离。 无机械可动部分,可靠性高,安装简单、方便,属于非接触测量,且不受液体的粘度、密度等影响 精度比较低,测试容易有盲区。不可以测量压力容器,不能测量易挥发性介质。 电容式液位计 采用测量电容的变化来测量液面的高低的。它是一根金属棒插入盛液容器内,金属棒作为电容的一个极,容器壁作为电容的另一极。两电极间的介质即为液体及其上面的气体。由于液体的介电常数ε1和液面上的介电常数ε2不同,比如:ε1》ε2,则当液位升高时,两电极间总的介电常数值随之加大因而电容量增大。反之当液位下降,ε值减小,电容量也减小。所以,可通过两电极间的电容量的变化来测量液位的高低。电容液位计的灵敏度主要取决于两种介电常数的差值,而且,只有ε1和ε2的恒定才能保证液位测量准确,因被测介质具有导电性,所以金属棒电极都有绝缘层覆盖。 传感器无机械可动部分,结构简单、可靠;精确度高;检测端消耗电能小,动态响应快;维护
英国留学热门专业介绍
英国留学热门专业介绍 对于中国留学生来说,去英国留学之前选择一个前景好的热门专业,对自己以后的职业发展道路有着更多好处。英国留学热门专业有那么多,中国学生对于这些热门专业知道多少呢? 1.传媒 英国的传媒专业课程的主要目的便是通过传媒业在社会特别是在文化上的差异,培养学生的对英国乃至世界的电视、电影、广播、新闻通讯等传媒载体的逆向思维能力。主要包括大众传媒,传媒管理,电影电视研究,影视制作,播音,编辑等,英国院校的大众传媒专业实力强劲,而且专业方向涉及数字电视、多媒体、广告学等新兴传媒领域。 2.商科 近几年留学申请者多半选择了商科,而商科中选择读金融或者金融相关专业的学生比例很大,常见的一些专业:管理,国际贸易,市场营销,金融,经济,投资,MBA,会计等等。一些较好的大学更是学生的热门选择,比如LSE,曼彻斯特大学,约克大学经济学专业,均是学生的热选。
近几年,会计就业形势大好。英国会计专业应届大学毕业生平均年薪可达4.5万美元。在国内,财会专业的“海归”也具有较大的就业优势,尤其是外资企业和跨国公司更倾向于选择有海外留学背景或持有国际执业资格证书的人才。英国留学专家提醒,拥有会计学硕士以上学历,且具备专业资质的人才更吃香。因此,留英时应尽量选择职业型会计课程,既拿到学位证书,又赢取专业资质。 3.建筑学 英国建筑学在国际上享有极高的声誉和地位。主要名校有:谢菲尔德大学,该校建筑学的教学水平和研究水平在国际学术界享有很高的声誉,教学水平获得Excellent,研究水平得到5分。爱丁堡大学(The University of Edinburgh),其建筑专业高居于专业前十强。另外,曼彻斯特大学、女王大学贝尔法斯特、利兹城市大学、卡迪夫大学都在建筑学专业有很高水平。 4.工程学 英国可供选择的工程学课程可分为职业课程、本科课程、研究生课程、工商管理硕士。读工程专业是中国学生留学英国的传统方向。英国留学专家表示,随着高科技的迅猛发展,拥有环保工程、生物工程、材料工程、化学工程等专业教育背景的人才开始吃香,尤其是那些既能解决技术问题又懂得国际商
工业机器人分类本体结构及技术指标
工业机器人分类、本体结构和技术指标 “工业机器人”专项技能培训——杜宇 英属哥伦比亚大学(UBC)博士 大连大华中天科技有限公司CEO 主要内容 一、常用运动学构型 二、机器人的主要技术参数 三、机器人常用材料 四、机器人主要结构 五、机器人的控制系统 一、常用运动学构形 1、笛卡尔操作臂 优点:很容易通过计算机控制实现,容易达到高精度。 缺点:妨碍工作, 且占地面积大, 运动速度低, 密封性不好。 ①焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、 分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟 随、排爆等一系列工作。 ②特别适用于多品种,便批量的柔性化作业,对于稳定,提 高产品质量,提高劳动生产率,改善劳动条件和产品的快速 更新换代有着十分重要的作用。 2、铰链型操作臂(关节型) 关节机器人的关节全都是旋转的, 类似于人的手臂,工业机器人中最 常见的结构。它的工作范围较为复杂。 ①汽车零配件、模具、钣金件、塑料制品、运动器材、玻璃制品、陶 瓷、航空等的快速检测及产品开发。 ②车身装配、通用机械装配等制造质量控制等的三坐标测量及误差检 测。 ③古董、艺术品、雕塑、卡通人物造型、人像制品等的快速原型制作。 ④汽车整车现场测量和检测。 ⑤人体形状测量、骨骼等医疗器材制作、人体外形制作、医学整容等。 3、SCARA操作臂 SCARA机器人常用于装配作业, 最显著的特点是它们 在x-y平面上的运动具有较大的柔性, 而沿z轴具有 很强的刚性, 所以, 它具有选择性的柔性。这种机器 人在装配作业中获得了较好的应用。 ①大量用于装配印刷电路板和电子零部件 ②搬动和取放物件,如集成电路板等 ③广泛应用于塑料工业、汽车工业、电子产品工业、 药品工业和食品工业等领域. ④搬取零件和装配工作。
如何训练分类器
如何用OpenCV训练自己的分类器 另:英文说明http://se.cs.ait.ac.th/cvwiki/opencv:tutorial:haartraining 最近要做一个性别识别的项目,在人脸检测与五官定位上我采用OPENCV的haartraining 进行定位,这里介绍下这两天我学习的如何用opencv训练自己的分类器。在这两天的学习里,我遇到了不少问题,不过我遇到了几个好心的大侠帮我解决了不少问题,特别是无忌,在这里我再次感谢他的帮助。 一、简介 目标检测方法最初由Paul Viola [Viola01]提出,并由Rainer Lienhart [Lienhart02]对这一方法进行了改善。该方法的基本步骤为:首先,利用样本(大约几百幅样本图片)的 harr 特征进行分类器训练,得到一个级联的boosted分类器。 分类器中的"级联"是指最终的分类器是由几个简单分类器级联组成。在图像检测中,被检窗口依次通过每一级分类器,这样在前面几层的检测中大部分的候选区域就被排除了,全部通过每一级分类器检测的区域即为目标区域。 分类器训练完以后,就可以应用于输入图像中的感兴趣区域的检测。检测到目标区域分类器输出为1,否则输出为0。为了检测整副图像,可以在图像中移动搜索窗口,检测每一个位置来确定可能的目标。为了搜索不同大小的目标物体,分类器被设计为可以进行尺寸改变,这样比改变待检图像的尺寸大小更为有效。所以,为了在图像中检测未知大小的目标物体,扫描程序通常需要用不同比例大小的搜索窗口对图片进行几次扫描。 目前支持这种分类器的boosting技术有四种:Discrete Adaboost, Real Adaboost, Gentle Adaboost and Logitboost。 "boosted" 即指级联分类器的每一层都可以从中选取一个boosting算法(权重投票),并利用基础分类器的自我训练得到。 根据上面的分析,目标检测分为三个步骤: 1、样本的创建 2、训练分类器 3、利用训练好的分类器进行目标检测。 二、样本创建 训练样本分为正例样本和反例样本,其中正例样本是指待检目标样本,反例样本指其它任意图片。 负样本 负样本可以来自于任意的图片,但这些图片不能包含目标特征。负样本由背景描述文件来描述。背景描述文件是一个文本文件,每一行包含了一个负样本图片的文件名(基于描述文件的相对路径)。该文件创建方法如下: 采用Dos命令生成样本描述文件。具体方法是在Dos下的进入你的图片目录,比如我的图片放在D:\face\posdata下,则: 按Ctrl+R打开Windows运行程序,输入cmd打开DOS命令窗口,输入d:回车,再输入cd D:\face\negdata进入图片路径,再次输入dir /b > negdata.dat,则会图片路径下生成一个negdata.dat文件,打开该文件将最后一行的negdata.dat删除,这样就生成了负样本描述文件。dos命令窗口结果如下图:
英国人力资源管理专业硕士介绍 简述分类院校和申请要求
英国人力资源管理(H R M) HRM为何选英国而不在国内念呢?因为相对于国内的人力资源管理课程,英国的课程设置更细致,专业概念更加专业, 从人员的挑选前期的准备开始工作,到合理的激励员工,到解聘以及养老金的发放,一应俱全。总之,想学到比国内更专业的HRM吗?选英国肯定没错啦。 人力资源管理(HRM) 简单的说就是培养未来从事部门管理、企业管理、劳动人事管理工作的人才。HRM涉及的内容有六个方面:人力资源规划、招聘与配置、培训与开发、绩效管理、薪酬管理、劳动关系管理。 一般来说选择此类专业,未来工作的局限性比较大,基本就被定型在管理类型上来了。刚毕业的应届毕业生刚进公司,一定是先从HR Assistant做起的。还有一种好的发展途径,就是进一些世界知名的咨询公司:Hewitt 或Mercer等,都是专业进行人力资源咨询的一流公司。也有一些去了政府部门、或者教书等。 什么样的人适合人力资源管理(HRM)? 虽说三百六十行行行出状元,但首先必须要找到适合自己的那一行呢。如果有幸在一家大公司做到HR总监的位置,是可以达到很客观的年薪的,50~100万。但是想成为一个成功的HR,小编觉得不仅仅需要文能舞墨,还需要伶牙俐齿,不说上知天文地理,起码在大的场合下能够hold住全场;最重要的还需要了解经济领域,知晓最基本的知识。 >>英国人力资源管理(HRM)留学申请为什么要去英国读人力资源管理? 英国的HRM远远专业于国内,而且英国很多企业的HR机构也为在读学生设置了实习岗位,有更早的接触关于人力资源的实际操作机会。而且如果在实习期间表现的好的话可以直接留下来。这样的机会在国内可是相当少的。 除此之外呢,选择英国还有一个重要的原因,就是英国的人力资源专业CIPD认证。大家都知道,在英联邦国家,大部分职业都会有一个或多个专业机构,组织业内人士,对大学的相关课程进行评估和认定。例如,会计师在英国有ACCA,澳大利亚有CPA。同样,英国的人力资源协会(The Chartered Institute of Personnel and Development, CIPD)是从事人力管理和发展职业专业人士的组织,针对英国人力资源专业的认证。在英联邦国,
国际疾病分类(ICD-10)
国际疾病分类(ICD-10) 国际疾病分类,ICD-10, 一、ICD-10介绍 1、ICD是什么, ICD是分类疾病的国际统一标准 ICD,10是用英文字母加数字的办法来表示一个疾病或一疾病如:急性透壁性心肌梗死I21.3 ICD,10根据疾病的重要程度和疾病的发生频率将疾病分类成:亚目: E10.0胰岛素依赖型糖尿病伴有昏迷类目: E10胰岛素依赖型糖尿病节:糖尿病章,系统,:内分泌、营养和代谢性疾病 2、ICD的历史 国际疾病分类的历史可追朔到1891年~国际统计研究所组织了一个起草死亡原因分类的委员会~由耶克伯蒂隆任主席。 1893年耶克伯蒂隆在国际统计大会上提出了一个分类系统~包括三个死亡原因分类方案~第一个44条~第二个99条~第三个是161条。这个分类系统就是ICD的原始。 3、ICD的修订制度 1898年在渥太华会议上提出的十年修订制度。 修订次数 4、世界共有十个分类中心 澳大利亚,英语, 英国,英语, 美国,英语,
中国,中文, 法国,法语, 瑞典,负责北欧, 巴西,葡萄牙语, 俄罗斯联邦,俄语, 委内瑞拉,西班牙, 科威特,阿拉伯语, 二、ICD的作用: 国内与国际交流意义 医疗、研究与教学 统计 管理 医疗付款 美国2000年的财政年度医疗保险,medicare,估计错误赔付率是6.8%~合119亿美元,年度共1736亿美元,。1999年是错误赔付率是8%~合135亿美元。1996年错误赔付率是14%~合232亿美元。 美医疗财务管理局,Health Care Financing Administration,希望到2002年错误赔付率可以降至5%。这些错误根据美国监督总局,office of inspectorGeneral,报告~全部是医师提供医疗信息有误和编码有误的结果。 三、ICD与临床医师的关系 1、病案首页的填写
工业机器人种类介绍
工业机器人种类介绍 关键词:机器人,种类介绍移动机器人 (AGV) 移动机器人(AGV)是工业机器人的一种类型,它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,它可广泛应用于机械、电子、纺织、卷烟、医疗、食品、造纸等行业的柔性搬运、传输等功能,也用于自动化立体仓库、柔性加工系统、柔性装配系统(以AGV作为活动装配平台);同时可在车站、机场、邮局的物品分捡中作为运输工具。 国际物流技术发展的新趋势之一,而移动机器人是其中的核心技术和设备,是用现代物流技术配合、支撑、改造、提升传统生产线,实现点对点自动存取的高架箱储、作业和搬运相结合,实现精细化、柔性化、信息化,缩短物流流程,降低物料损耗,减少占地面积,降低建设投资等的高新技术和装备。 点焊机器人 焊接机器人具有性能稳定、工作空间大、运动速度快和负荷能力强等 焊接机器人 特点,焊接质量明显优于人工焊接,大大提高了点焊作业的生产率。 点焊机器人主要用于汽车整车的焊接工作,生产过程由各大汽车主机厂负责完成。国际工业机器人企业凭借与各大汽车企业的长期合作关系,向各大型汽车生产企业提供各类点焊机器人单元产品并以焊接机器人与整车生产线配套形式进入中国,在该领域占据市场主导地位。 随着汽车工业的发展,焊接生产线要求焊钳一体化,重量越来越大,165公斤点焊机器人是当前汽车焊接中最常用的一种机器人。2008年9月,机器人研究所研制完成国内首台165公斤级点焊机器人,并成功应用于奇瑞汽车焊接车间。2009年9月,经过优化和性能提升的第二台机器人完成并顺利通过验收,该机器人整体技术指标已经达到国外同类机器人水平。 弧焊机器人 弧焊机器人主要应用于各类汽车零部件的焊接生产。在该领域,国际大 弧焊机器人 型工业机器人生产企业主要以向成套装备供应商提供单元产品为主。
液位传感器的分类方法
按液位计传感器的所属学科分类。可分为物理型、化学型和生物型。把被测量转换成电址参数;化学型是利用化学反应,物理型是利用各种物理效应,把被测量转换成为电量参数;生物型是利用生物 按液位计传感器转换过程中的能量关系分类,可分为能最转换型和能最控制型。能量转换型是磁性翻柱液位计传感器直接将被测量的能最转换为输出量的能量;能量控制型是由外部供给液位计传感器能量。而由被测量来控制输出的能量。 按液位计传感器转换原理分类,可分为电阻式、微波式、激光式、超声式、光电式、热电式、电感式、电容式、电磁式、压电式、髯尔式、光纤式及核辐射式等等。 按液位计传感器转换过程中的物理现象分类,可分为结构型和物性型。结构型是依靠液位计传感器结构变化来实现参数转换的;物性型是利用液位计传感器的敏感元件特性变化实现参数转换的。 按液位计传感器的用途分类。可分为重址、位移、速度、加速度、力、电压、电流、温度、压力、流傲、功率物性参数等等。 效应及机体部分组织、微生物,把被测量转换为电最参数。 按液位计传感器输出量的形式分类,可分为模拟式和数字式。模拟式液位计传感器枪出为模拟量;数字式液位计传感器输出直接为数字量。 按液位计传感器的功能分类。可分为传统型和智能型。传统型磁翻板液位计传感器一般是指只具有显示和输出功能的液位计传感器;真正意义上的智能液位计传感器,推理、感知、应该具备学习、通讯等功能,具有精度高、性能价格比高、使用方便等特点。 智能型液位计传感器发展迅速,目前可实现的功能,概括起来有: 具有自动补偿功能具有自校零、自标定、白校正功能;具有双向通讯、标准化数字输出或者符号输出功能能够自动采集数据,并对数据进行预处理;能够自动进行检验、自选量程、自动诊断故障;具有数据存储、记忆与信息处理功能;具有判断、决策处理功能。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商
爱丁堡大学生物多样性与植物分类学授课型研究生申请要求
爱丁堡大学 生物多样性与植物分类学授课型研究生申请要求
爱丁堡大学简介 学校名称爱丁堡大学 学校英文名称University of Edinburgh 学校位置英国 | 苏格兰 | 爱丁堡 2020 QS 世界排名20 爱丁堡大学概述 爱丁堡大学(The University of Edinburgh),简称爱大,是一所位于英国苏格兰首府爱丁堡的世界著名公立综合性研究型大学,苏格兰最高学府,英国老牌名校。爱大创建于1583年,是英语世界第6古老的高等学府。由于其悠久的历史、庞大的规模、卓越的教学质量与科研水平,爱丁堡大学在2015年和2016年维基百科世界大学影响力排名中均位居全球第16位 ;同时位列2020年QS世界大学排名第20位 ,2020年泰晤士高等教育世界大学排名第30位 ,2020年USNews世界大学排名第28位 ,2019年软科世界大学学术排名第31位 。 生物多样性与植物分类学专业简介 生物多样性与植物分类学 生物多样性与植物分类学专业相关信息
专业名称生物多样性与植物分类学 专业英文名称Biodiversity and Taxonomy of Plants MSc 隶属学院生物科学学院 学制1年 语言要求雅思6.5(单项6.0); 托福92(单项20)GMAT/GRE 要求不需要 2020 Fall 申请时间8月-9月(各学院开放时间不同) 学费(当地货币)32500 生物多样性与植物分类学课程内容 序号课程中文名称课程英文名称 1 * 爱丁堡大学生物多样性与植物分类学研究生申请要求由 Mastermate 收集并整理,如果发现疏漏,请以学校官网为准
简单分类器的MATLAB实现
简单分类器的MATLAB实现 摘要:本实验运用最小距离法、Fisher线形判别法、朴素贝叶斯法、K近邻法四种模式识别中最简单的方法处理两维两类别的识别问题,最后对实验结果进行了比较。 关键字:MATLAB 最小距离Fisher线形判别朴素贝叶斯K近邻法 一.M atlab语言简介 Matlab 语言(即Matrix 和Laboratory) 的前三位字母组合,意为“矩阵实验室”,Matlab 语言是一种具有面向对象程序设计特征的高级语言,以矩阵和阵列为基本编程单位。Matlab 可以被高度“向量化”,而且用户易写易读。传统的高级语言开发程序不仅仅需要掌握所用语言的语法,还需要对有关算法进行深入的分析。与其他高级程序设计语言相比,Matlab 在编程的效率、可读性以及可移植性等方面都要高于其他高级语言,但是执行效率要低于高级语言,对计算机系统的要求比较高。例如,某数据集是m*n的二维数据组,对一般的高级计算机语言来说,必须采用两层循环才能得到结果,不但循环费时费力,而且程序复杂;而用Matlab 处理这样的问题就快得多,只需要一小段程序就可完成该功能,虽然指令简单,但其计算的快速性、准确性和稳定性是一般高级语言程序所远远不及的。严格地说,Matlab 语言所开发的程序不能脱离其解释性执行环境而运行。 二.样本预处理 实验样本来源于1996年UCI的Abalone data,原始样本格式如下: 1 2 3 4 5 6 7 8 9 其中第一行是属性代码:1.sex 2.length 3.diameter 4.height 5.whole_weight 6.shucked_weight 7 .viscera weight 8. shell weight 9.age 原始样本是一个8维20类的样本集,就是根据Abalone的第一至第八个特征来预测第九个特征,即Abalone的年龄。为简单其见,首先将原始样本处理成两维两类别问题的样本。选取length和weiht作为两个特征向量,来预测第三个特征向量age.(age=6或者age=9),我们将age=6的样本做为第一类,age=12的样本做为第二类。 处理后的样本: length weight age
爱丁堡大学的传媒专业
https://www.docsj.com/doc/da8001080.html, 爱丁堡大学的传媒专业大概有3个: Digital Media & Culture(数字媒体与文化) Design & Digital Media(设计及数码媒体) Intermedia Art(媒体艺术) 从专业上来说,Digital Media & Culture侧重于在数字媒体背景下的设计理论的研究。立思辰留学360介绍说,大概是因为稍微篇理论,雅思要求7分,单科不低于6. Design & Digital Media侧重于数字技术在设计中的应用,偏重于技术与设计,雅思要求6.5单科不低于6. Intermedia Art偏重于跨领域的媒体艺术,理论的学校少很多,更偏重于创作。雅思要求6.5单科不低于5.5. 由此可见,这三个专业从理论到应用再到创作,各有侧重。选择专业的时候,可以根据自己的偏好来看。 爱丁堡大学世界排名 爱丁堡大学在各类世界大学排名的表现非常优异: 根据2016/17年的QS世界大学排名,爱丁堡大学被列为苏格兰首位,世界第19位。 根据2015/2016的泰晤士高等教育世界大学排名(Times),爱丁堡大学被列为世界第24位。
https://www.docsj.com/doc/da8001080.html, 根据2017/2018的usnews世界大学排名,爱丁堡大学位列世界第30位。 根据2017年的ARWU世界大学学术排名,爱丁堡大学位列世界第32位。 根据2015/16和2016/17年的维基百科世界大学影响力排名,爱丁堡大学均位列全球第16位。 立思辰留学360介绍说,根据泰晤士高等教育《最受全球雇主欢迎的世界大学毕业生就业力》排名中,爱丁堡大学在2013年和2014年分别被列为世界第15位和第18位。 根据2016年QS全球高校毕业生就业力榜单,爱丁堡大学毕业生的就业力排名世界第23位。
opencv自己训练分类器进行物体识别
从SVM的那几张图可以看出来,SVM是一种典型的两类分类器,即它只回答属于正类还是负类的问题。而现实中要解决的问题,往往是多类的问题(少部分例外,例如垃圾邮件过滤,就只需要确定“是”还是“不是”垃圾邮件),比如文本分类,比如数字识别。如何由两类分类器得到多类分类器,就是一个值得研究的问题。 还以文本分类为例,现成的方法有很多,其中一种一劳永逸的方法,就是真的一次性考虑所有样本,并求解一个多目标函数的优化问题,一次性得到多个分类面,就像下图这样: 多个超平面把空间划分为多个区域,每个区域对应一个类别,给一篇文章,看它落在哪个区域就知道了它的分类。 看起来很美对不对?只可惜这种算法还基本停留在纸面上,因为一次性求解的方法计算量实在太大,大到无法实用的地步。 稍稍退一步,我们就会想到所谓“一类对其余”的方法,就是每次仍然解一个两类分类的问题。比如我们有5个类别,第一次就把类别1的样本定为正样本,其余2,3,4,5的样本合起来定为负样本,这样得到一个两类分类器,它能够指出一篇文章是还是不是第1类的;第二次我们把类别2 的样本定为正样本,把1,3,4,5的样本合起来定为负样本,得到一个分类器,如此下去,我们可以得到5个这样的两类分类器(总是和类别的数目一致)。到了有文章需要分类的时候,我们就拿着这篇文章挨个分类器的问:是属于你的么?是属于你的
么?哪个分类器点头说是了,文章的类别就确定了。这种方法的好处是每个优化问题的规模比较小,而且分类的时候速度很快(只需要调用5个分类器就知道了结果)。但有时也会出现两种很尴尬的情况,例如拿一篇文章问了一圈,每一个分类器都说它是属于它那一类的,或者每一个分类器都说它不是它那一类的,前者叫分类重叠现象,后者叫不可分类现象。分类重叠倒还好办,随便选一个结果都不至于太离谱,或者看看这篇文章到各个超平面的距离,哪个远就判给哪个。不可分类现象就着实难办了,只能把它分给第6个类别了……更要命的是,本来各个类别的样本数目是差不多的,但“其余”的那一类样本数总是要数倍于正类(因为它是除正类以外其他类别的样本之和嘛),这就人为的造成了上一节所说的“数据集偏斜”问题。 因此我们还得再退一步,还是解两类分类问题,还是每次选一个类的样本作正类样本,而负类样本则变成只选一个类(称为“一对一单挑”的方法,哦,不对,没有单挑,就是“一对一”的方法,呵呵),这就避免了偏斜。因此过程就是算出这样一些分类器,第一个只回答“是第1类还是第2类”,第二个只回答“是第1类还是第3类”,第三个只回答“是第1类还是第4类”,如此下去,你也可以马上得出,这样的分类器应该有5 X 4/2=10个(通式是,如果有k个类别,则总的两类分类器数目为k(k-1)/2)。虽然分类器的数目多了,但是在训练阶段(也就是算出这些分类器的分类平面时)所用的总时间却比“一类对其余”方法少很多,在真正用来分类的时候,把一篇文章扔给所有分类器,第一个分类器会投票说它是“1”或者“2”,第二个会说它是“1”或者“3”,让每一个都投上自己的一票,最后统计票数,如果类别“1”得票最多,就判这篇文章属于第1类。这种方法显然也会有分类重叠的现象,但不会有不可分类现象,因为总不可能所有类别的票数都是0。看起来够好么?其实不然,想想分类一篇文章,我们调用了多少个分类器?10个,这还是类别数为5的时候,类别数如果是1000,要调用的分类器数目会上升至约500,000个(类别数的平方量级)。这如何是好? 看来我们必须再退一步,在分类的时候下功夫,我们还是像一对一方法那样来训练,只是在对一篇文章进行分类之前,我们先按照下面图的样子来组织分类器(如你所见,这是一个有向无环图,因此这种方法也叫做DAG SVM)
几种液位计的原理与选型
几种液位计的原理与选型. 磁翻柱液位计 主要原理 磁翻柱液位计也称为磁翻板液位计,它的结构主要基于浮力和磁力原理设计生产的。带有磁体的浮子(简称磁性浮子)在被测介质中的位置受浮力作用影响。液位的变化导致磁性浮子位置的变化、磁性浮子和磁翻柱(也成为磁翻板)的静磁力耦合作用导致磁翻柱翻转一定角度(磁翻柱表面涂敷不同的颜色),进而反映容器内液位的情况。 配合传感器(磁簧开关)和精密电子元器件等构成的电子模块和变送器模块,可以变送输出电阻值信号、电流值(4~20mA)信号、开关信号以及其他电学信号。从而实现现场观测和远程控制的完美结合。 适用范围及特点 本液位计采用优质磁体和进口电子元件,使产品具有:设计合理、结构简单、使用方便、性能稳定、使用寿命长、便于安装维护等优点。 本液位计输出信号多样,实现远距离的液位指示、检测、控制和记录。 本液位计几乎可以适用于各种工业自动化过程控制中的液位测量与控制。可以广泛运用于石油加工、食品加工、化工、水处理、制药、电力、造纸、冶金、船舶和锅炉等领域中的液位测量、控制与监测。 磁浮球液位计(液位开关) 主要原理 磁浮球液位计(液位开关)结构主要基于浮力和静磁场原理设计生产的。带有磁体的浮球(简称浮球)在被测介质中的位置受浮力作用影响:液位的变化导致磁性浮子位置的变化。浮球中的磁体和传感器(磁簧开关)作用,使串联入电路的元件(如定值电阻)的数量发生变化,进而使仪表电路系统的电学量发生改变。也就是使磁性浮子位置的变化引起电学量的变化。通过检测电学量的变化来反映容器内液位的情况。 该液位计可以直接输出电阻值信号,也可以配合使用变送模块,输出电流值(4~20mA)信号;同时配合其他转换器,输出电压信号或者开关信号(也可以按照客户需求转换器由公司配送)。从而实现电学信号的远程传输、分析与控制。 适用范围及特点 本产品采用优质磁体和进口电子元件,使产品具有:结构简单、使用方便、性能稳定、使用寿命长、便于安装维护等优点。 本产品几乎可以适用与各种工业自动化过程控制中的液位测量与控制,可以广泛运用于石油加工、食品加工、化工、水处理、制药、电力、造纸、冶金、船舶和锅炉等领域中的液位测量、控制与监测。 防爆浮球液位开关 主要原理 防爆浮球液位开关,也称为防爆浮球液位控制器。它是专门为爆炸性环境中使用而设计制造的液位控制仪表,本产品是基于浮力原理和杠杆原理设计的,当容器内液位发生变化时,浮球的位置将随液位的变化而变化,浮球的这种位移将通过杠杆作用于微动开关,进而由微动开关产生开关信号。 适用范围及特点 本产品采用优质材料和进口电子元件,使产品具有:设计合理、结构简单、使用方便、性能
英国爱丁堡大学数学专业英国排名前十
英国爱丁堡大学数学专业英国排名前十 /ueditor/201901/18/73b21d6414f76dcbc8ab337cd0f17f5 7.jpg" title="blob.png" alt="blob.png"/> 一、为什么选择爱丁堡大学的数学? 我们在2018年的QS世界大学排名中,爱丁堡大学的数学数学专业英国大学中排名第10。我们在学习社区投入了大量资金。您将获得MathPALs的支持,这些高年级学生将提供帮助和建议。我们的数学基础和数学中心为社交和学习提供了共同的领域。 我们的教学重点是促进互动参与,促进长期理解。特别是在早期,您将参与通过在线投票系统解决的问题的小组讨论。我们积极鼓励协作工作,并在早年使用开卷考试来强调理解。 有很多机会可以发展你的技能和简历以及学术工作。我们的外展团队领导课程,例如从40,000张名片中构建分形图并为展览组装数学艺术作品。您可以成为MathsPal或学生大使或申请我们的课程奖学金之一,在暑假期间与讲师一起工作或参与Hyperloop One等外部课程。 二、数学专业纵览 数学是日常生活和我们看待世界的方式的核心。这本身就是一
次智力冒险,但它也被用来了解物理世界-从引力波到全球变暖-以及在商业和工业中寻找解决方案。我们所有的学生在早年都参加相同的必修课程,通常可以在1年级和2年级的不同课程之间切换。由于这种灵活性,我们建议只申请我们的一个课程。 在以后的几年里,您可以选择我们广泛的纯数学、应用数学、统计学、运筹学和金融数学课程。我们所有的课程都可以采用广泛的形式,您还可以在第1年和第2年学习其他科目。这些课程可能涉及物理学或信息学等相关领域,也可能来自整个大学提供的广泛课程。在一个广泛的课程中,本科课程和MA需要四年时间,而MMath 需要五年。对于某些课程,准备充分的申请者可以选择2年级入学,并遵循从一开始就专注于数学的加速课程。我们通过额外的数学课程支持这一课程,涵盖了一年级课程的主要思想。 三、你将学习什么 1年级课程: 您将学习线性代数,微积分和证明及问题解决的必修课程。这些是我们所有课程的共同点,将占用您时间表的一半。它们将使您能够建立在纯数学知识的基础上,并将向您介绍大学水平所需的更严格的数学思维方式。您还将学习数学以外的科目。您将获得MathsBase,我们受欢迎的步入式帮助中心和我们的学生学习顾问的支持。 2年级课程: 你将花费半数到三分之二的时间用在数学上。您将学习纯数学
xml分类器训练
分类:数据库/DB2/文章 第一步采集样本 1、将正负样本分别放在两个不同的文件夹下面 分别取名pos和neg,其中pos用来存放正样本图像,neg用来存放负样本 注意事项:1、正样本要统一切成24*24像素(或者其他)的格式,建议保存成灰度图,节省空间 2、正样本的数目越多,训练的时间也将越长,训练出来的效果也就越好 3、负样本的数量想对于正样本一定要足够的多,很多朋友在训练的时候,往往出现了CPU占用率达到了100%,但是训练只是停留在一个分类器长达几小时没有相应,问题出现在取负样本的那个函数icvGetHaarTrainingDataFromBG中; 当剩下所有的negtive样本在临时的cascade Classifier中,evaluate的结果都是0(也就是拒绝了),随机取样本的数目到几百万都是找不到误检测的neg样本了,因而没法跳出循环 2、建立正负样本的说明文件 这里我们假定根目录在D:\boost下面。
在cmd下面进入pos目录,输入dir /b > pos.txt 这个时候会在pos文件加下面生成一个pos.txt文件,打开pos.txt
我们对它进行如下编辑: (1)、将BMP 替换成为BMP 1 0 0 24 24 注意:1代表此图片出现的目标个数后面的0 0 24 24代表目标矩形框(0,0)到(24,24),用户可以根据自身需要调整数值(2)、删除文本中最后一行的“pos.txt”
2、对负样本进行编辑 在CMD下输入dir /b > neg.txt 同理,打开neg目录下的neg.txt文件,只需要删除最后一行的neg.txt这一句 注意:1、负样本说明文件不能含有目标物体 2、负样本图像尺寸不受到限制,但是尺寸越大,训练所用的时间越长, 3、负样本图像可以是灰度图,也可以不是,笔者建议使用灰度图,这样处理起来可能更有效率 4、负样本图像一定不要重复,增大负样本图像的差异性,可以增加分类器的使用范围,笔者建议可以使用网上的素材库,将1000多张不含目标的图片灰度处理后用来训练,效果更佳 二、使用opencv_createsamples.exe创立样本VEC文件 1、首先我们将要用的的2个程序opencv_createsamples.exe和opencv_haartraining.exe拷到根目录下 在CMD下输入如下命令: opencv_createsamples.exe -vec pos.vec -info pos\pos.txt -bg neg\neg.txt -w 40 -h 40 -num 142 以上参数的含义如下:
水位传感器种类、工作原理介绍
水位传感器种类、工作原理介绍 水位传感器是一种可以检测水位的传感器,主要应用于医疗、食品、化工行业中,进行水位控制、水位的检测。先介绍水位传感器的分类。 水位传感器的种类: 水位传感器种类很多,包括单法兰静压/双法兰差压水位传感器,浮球式水位传感器,磁性水位传感器,投入式水位传感器,电动内浮球水位传感器,电动浮筒水位传感器,电容式水位传感器,磁致伸缩水位传感器,伺服水位传感器等,超声波水位传感器,雷达水位传感器等。 (图片源自网络)
(图片来源于网络)
上图是一个水位传感器种类的大概情况,由此图我们可以看出水位传感器种类较多,主要可以分为接触式和非接触式两种。 浮筒式水位传感器:浮筒式水位变送器是将磁性浮球改为浮筒,水位传感器是根据阿基米德浮力原理设计的。浮筒式水位变送器是利用微小的金属膜应变传感技术来测量液体的水位、界位或密度的,它在工作时可以通过现场按键来进行常规的设定操作。 浮球式水位传感器:浮球式水位变送器由磁性浮球、测量导管、信号单元、电子单元、接线盒及安装件组成,一般磁性浮球的比重小于0.5,可漂于液面之上并沿测量导管上下移动,导管内装有测量元件,它可以在外磁作用下将被测水位信号转换成正比于水位变化的电阻信号,并将电子单元转换成信号输出。浮球开关因为是最简单、最古老的检测方式,有着检测水位不精确的缺点,浮子易卡死。 (图片源自网络)
静压式水位传感器: 该变送器利用液体静压力的测量原理工作,它一般选用硅压力测压传感器将测量到的压力转换成电信号,再经放大电路放大和补偿电路补偿,最后以4~20mA或0~10mA电流方式输出。 超声波式水位传感器: 这是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的超声波,超声波在碰到液体会产生显著反射形成反射成回波。因此以超声波作为检测手段,产生超声波和接收超声波。这就是超声波式的水位传感器工作原理。超声波式水位传感器特点:频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播。 光电式水位传感器: 光电液位传感器是利用光在两种不同介质界面发生反射折射原理而 开发的新型接触式点液位测控装置。光电水位传感器具有结构简单、定位精度高,没有机械部件,不需调试,灵敏度高及耐腐蚀、耗电少、体积小等诸多优点,还具有耐高温、耐高压、耐强腐蚀,化学性质稳定,对被测介质影响小等特征。