雷达在船舶走锚判断中的应用
CCS锚机规范
第2章锚机装置 2.1 适用范围 2.1.1 本章适用于海船的电动、液压、蒸汽或外力驱动的锚机装置。 2.1.2 本章所指的“锚机装置”在适当处应理解为“起锚机和起锚绞盘”。 2.1.3 对于起锚系泊组合机,除本章外,还应参阅本篇第3章绞车。 2.2 认可和检验依据 2.2.1 本章采用的认可和检验依据如下: (1)CCS《钢质海船入级规范》(2006)及其修改通报(2007); (2)CCS《材料与焊接规范》(2006)及其修改通报; (3)ISO4568-2006《造船-海船-起锚机和起锚绞盘》。 2.3 定义 2.3.1 ISO3828、ISO4568和CCS《钢质海船入级规范》(2006)中给出的定义适用本章。2.3.2 本章有关定义如下: (1)跳链:起锚机在起锚或抛锚的过程中,因锚链与锚链轮的啮合发生错位,锚链向其抛出方向窜出一节或数节的现象。跳链现象对起锚机会产生较大的冲 击。 (2)卡链:起锚机在起锚的过程中,因锚链与锚链轮的啮合原因,锚链在进入锚链舱方向与锚链轮不能正常脱开的现象。卡链现象对锚链筒和分链器(链舌) 会产生冲击。 2.4 图纸资料 2.4.1 下列图纸资料应提交批准: (1)产品主要性能规格; (2)总装配图; (3)主要零部件图; (4)主要系统原理图及安全报警装置; (5)计算书; (6)主要零件材料理化性能一览表; (7)型式试验大纲。 2.4.2 下列图纸资料应提交备查: (1)有关主要的验收标准; (2)产品使用说明书。 2.5 重要零部件 2.5.1 起锚机中的下列(如有)外购件应持有CCS产品证书: (1)电动机(50kW及以上);
走锚全损事故及走锚后的应急预案
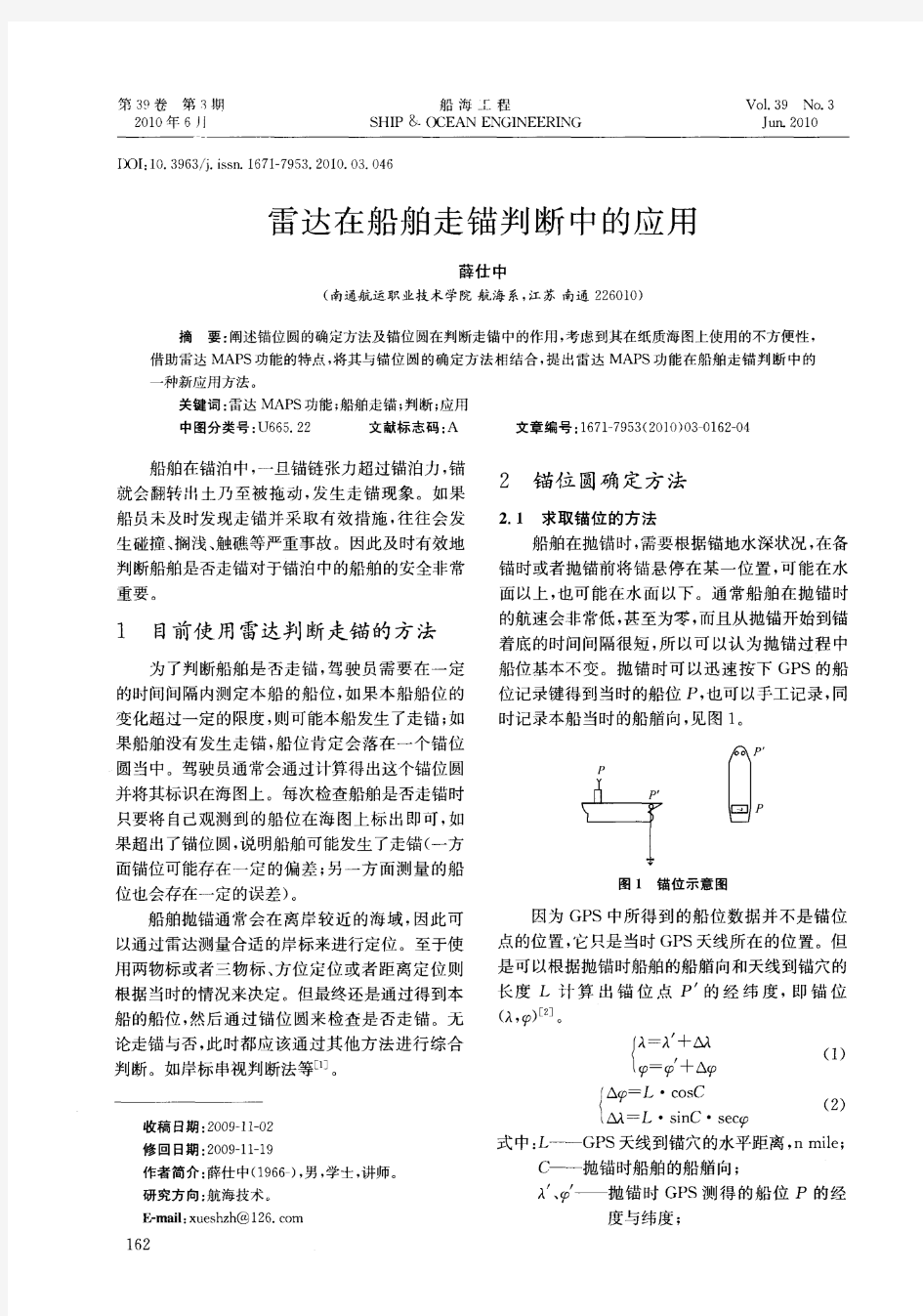
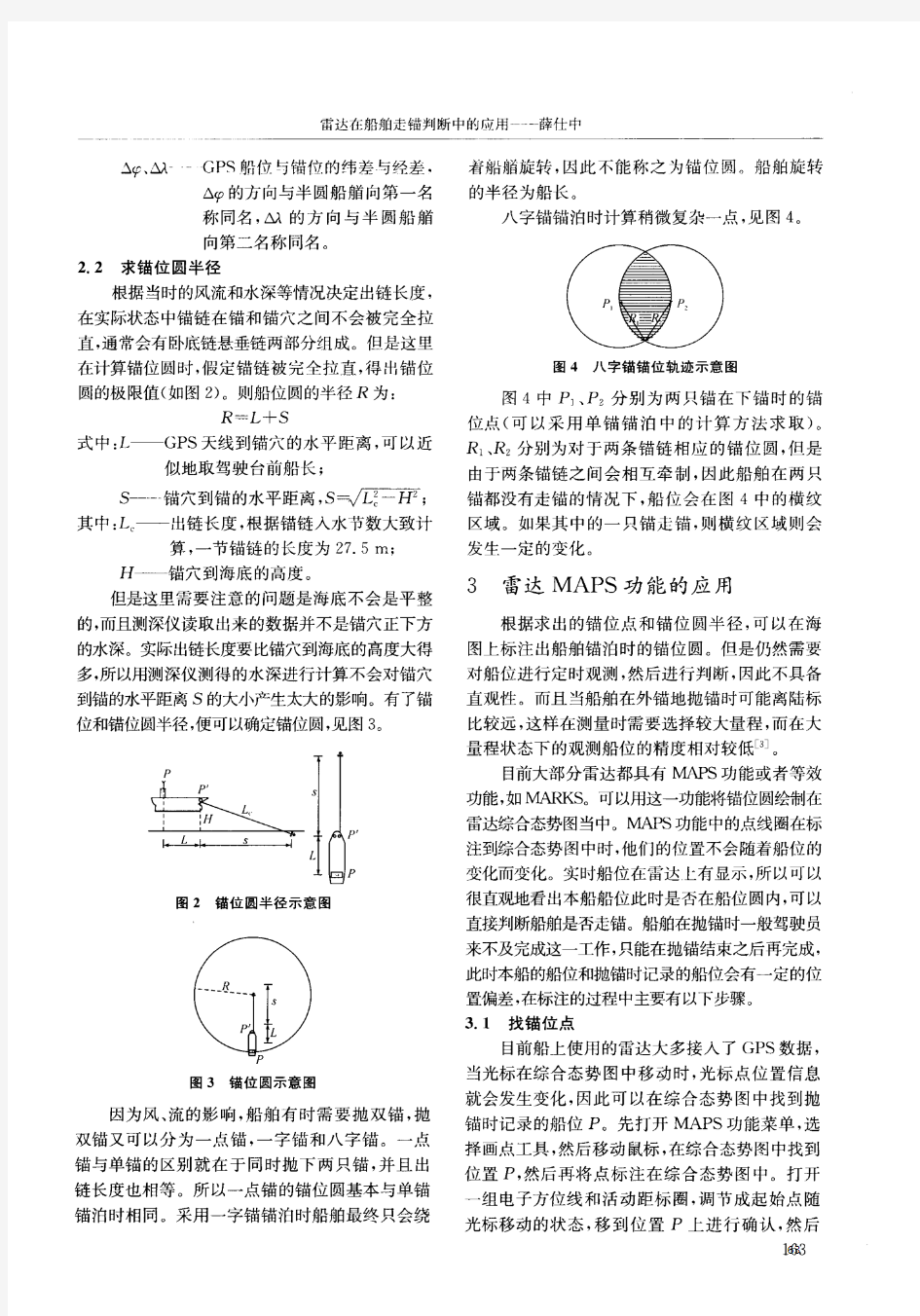
第41卷第5期2012年10月船海工程 SHIP &OCEAN ENGINEERING Vol.41No.5Oct.2012 DOI :10.3963/j.issn.1671- 7953.2012.05.037走锚全损事故及走锚后的应急预案分析 荣 雷,崔建辉,王永洲 (天津理工大学海运学院,天津300384) 摘 要:对一起典型船舶受强风暴袭击走锚搁浅进而导致全损事故的事故原因从人、机、环境和管理等方 面进行深入分析。鉴于走锚事故频发且后果严重,建议制定船舶走锚后应急预案,特别强调船长在采取起锚重新抛措施前需考量的内容。 关键词:船舶走锚;船舶失控;应急措施;应急预案中图分类号:U675.92 文献标志码:A 文章编号:1671- 7953(2012)05-0138-04收稿日期:2011-11-09修回日期:2011-11-28 资助项目:天津市高等学校科技发展基金计划项目 (20100421); 天津理工大学教学基金项目(YB08-26) 第一作者简介:荣 雷(1962-),男,学士,副教授 研究方向:船舶避碰与操纵E-mail :ronglei1962@sina.com 杂货船TH ,船长100m 满载钢材于2007年3 月4日10:50在韩国釜山港外N4锚地附近抛锚,锚地水深约40m ,平均吃水7.1m 。抛右锚,锚链6节入水,后至7节半入水。因遭遇强风暴发生走锚搁浅事故,导致货船严重受损。 1事故原因分析 恶劣天气固然是导致事故发生的主要原因, 特别是起锚后风力急剧增大导致起锚后船舶失 控;但是,人为因素不能忽略,相同海况下同锚地的其它船舶并没有发生搁浅事故。1.1人为因素的分析1.1.1 对气象条件变化的警惕性不足 当日的气象预报和气象传真图都显示有大风将至, 船舶在锚地抛锚,忽略了必要及时的警戒,反映出船长对锚泊安全的重视不足,对此有不可推卸的责任。1.1.2 采取的预防走锚措施不当船长判断有暴风来袭,未能采取果断、有效的 针对性预防措施。仅仅多松出一节半锚链的措施 显然过于简单, 对抑制走锚的效果很有限。此外,没有提前通知机舱备车,浪费了1h 多 的宝贵时间, 也没有采取其它有效的果断性措施。比如:在风力较小的情况下抛“一点锚”。经验证明此方法可有效防止大风浪气象条件下走锚。就 此事故而言,事发当天的下午就应考虑抛“一点锚”,或者在松锚链时亦可备车改抛“一点锚”。1.1.3走锚后的应变措施不当 在确认走锚的情况下,船长可根据当时的情 况和环境,考虑采取多种应变措施[1-4]。1)考虑到下风侧离岸距离较近,旋回水域有 限,可以进车顶风浪,缓解锚链受力,等待风暴过境。 2)立即抛下另一只锚,并使锚链流放,放至3 4节时适时刹牢,一般情况下可以将船定住,船艏会逐渐迎风。此措施的弊端是可能导致锚链交缠,事后锚链不易解脱,一般船长都不愿轻易采用此法。此方法可以在发现走锚的短时间内制止走锚或者减缓走锚的速度;但是,风力太大,达到10级及以上时,船舶还可能继续走锚,此时可以考虑适当适时地动车顶风浪,以待风暴过境。 3)起锚进车选择适合锚位重新抛锚,这可能是在正常情况下多数船长采取的更合逻辑的应变 措施。需要注意的是起锚前应先进车,待船稍有进速,锚链不甚吃力时,方可开始起锚。以防仓促 起锚,锚链吃力过大,松开刹车后丢锚丢链。此事故中船长采用此法显然没有考虑到当时的环境和条件,至少包括距岸距离近;起锚所需时间;外界因素特别是风力变化情况;船舶在风中的漂移速度;船舶受风面积;本轮的操纵性能等。没有考虑妥当而盲目采取起锚重抛,导致起锚过程中船舶失控快速向下风飘移。离岸距离很近,采取起锚重抛延误了时机,显然不妥。这说明采取 8 31
船舶用锚的计算和船舶阻力计算
船舶用锚的计算和船舶 阻力计算 Hessen was revised in January 2021
一、用锚的计算 锚的系留力:P=W aλa+W cλc L1 P―――系留力。是锚抓力与锚链摩擦力的和() W a―――锚在水中的重量。即锚在空气中重量×(Kg) Wc―――锚链每米长在水中的重量(Kg) L1―――锚链卧底部分的长度(m) λa λc―――锚的抓力系数和锚链的摩擦系数 霍尔锚的λa λc表 锚的抓重比(海军锚/霍尔锚) 锚的系留力也可用经验公式估算: P=W1H a+WH c L1 W1―――锚重(Kg) H a―――锚的抓重比(见表) W―――锚链每米的重量(Kg/m) H c―――锚链摩擦系数取- 二、锚链出链长度估算 1、正常天气,一般不少于下表
2、在急流区,出链长度不一般不少于表值 3、在风速30m/s(11级)风眩角为300时出链长度值 如链长小于5-6倍水深时,锚的抓力将因锚爪的切泥角小而变小,水面以下的链长的水深倍数与锚爪切泥角见表 三、八字锚与单锚的锚泊系留力的比值:见表 如图:
八字锚的系留力 四、航运船舶 1、锚重的估算: 每个首锚重量一般可用以下公式估算: W=KD2/3 (Kg) K―――系数。霍尔锚取6-8,海军锚取5-7 D―――船舶的排水量(t) 2、锚链尺寸估算: d=KD1/3或d=CW1/2或d=W1/2 d―――锚链直径(mm) K―――系数。可取- C―――系数。可取- 3、每节锚链重量估算: Q=Kd2 (Kg) K―――系数。有档链取,无档链取 4、锚链强度估算:
R=Kd2g (N) K―――系数。有档链取56,无档链取38 g―――(m/s2) 5、每节锚链环数估算: M=6250/d M―――每节锚链环数,取整数的单数(个) 五、工程船舶 以海军锚和锚缆计算 1、锚重: 船首边两只,每只锚重量按下式计算: W=K(A+15BT) (Kg) W―――锚重 A―――满载吃水线以上各部分在船中纵剖面上的投影面积(m2) B、T―――分别为船舶宽度与吃水(m) K―――系数。见表 锚重系数K值: 船尾边锚两只,其重量应不小于倍首边锚的重量
锚设备的组成与作用
锚设备的组成与作用 (一) 锚设备的组成 锚设备是由锚、锚链、锚链筒、制链器、锚机、锚链管、锚链舱和弃链器等组成,如图3-4所示。 图3-4 锚设备布置图 1-首锚;2-锚链筒;3-制链器;4-锚机;5-锚链;6-锚链管; 锚设备的组成是。 A、锚链、锚机 B、锚、锚链、锚机、导链滚轮 C、锚、锚链、锚机、制链器、离合器 D、锚、锚链、锚链筒、制链器、锚机、锚链管、弃链器等 锚设备应满足下列要求: 1.锚应有足够的抓力,锚链应有足够的长度,以保证在锚泊时固定牢靠,即使在强风急流的情况下船舶也不发生移动。 2.能随时迅速将锚抛出,以便船舶遇到险情时,能够利用锚做紧急制动。 3.能迅速起锚和收锚上船,保证船舶从固定停泊状态迅速转入航行状态,以应变突然海损事故的发生及救助其他遇难船舶的行动。 4.航行中,能将锚牢固地收藏在船上,即使船舶在风浪中颠簸摇摆也不易滑落。 *.锚设备性能要求应满足。①锚应有足够的抓力②锚链应有足够的长度③能随时迅速抛起锚④轻易不走锚⑤能将锚牢固地收藏在船上 A、①②③④⑤ B、①②③④ C、①②③⑤ D、②③④⑤ (二) 锚设备的主要作用 1.锚泊时系留船舶。 2.靠泊时抛“开锚”可控制船首摆动和船舶横移速度。 3.船掉头必要时,可抛锚带头,以帮助船回转和拎直船首,防止倒头。
4.抛“拖锚”或“倒锚”可控制船前进速度或紧急制动。 5.急流中靠泊时,在趸船上方抛“拎水锚”可减轻趸船负荷。 6.船搁浅时,送流锚至适当位置抛下,可稳定船位或拉脱浅。 *.锚设备的主要作用是。①锚泊时系留船舶②船掉头必要时,可抛锚带头③急流中靠泊时,抛“拎水锚”减轻趸船负荷④紧急制动 A、①②③④ B、①②④ C、①②③ D、① (三) 锚设备各部件的作用 1.锚:产生抓驻力。 2.锚链:主要用来连接锚和船体,传递锚的抓力。卧底与悬垂的锚链也能产生一定的系留力。 *.锚链的主要作用是。 A、连接锚和船体 B、传递锚的抓力 C、增加摩擦力 D、A+B 3.锚链筒:是锚链进出和收藏锚干的孔道。由甲板链孔、舷边链孔和筒体三部分组成。筒体内设有冲水装置,甲板链孔处设有防浪盖,舷边链孔做成能窝藏锚头和锚爪的锚穴。 *.锚链筒内设有喷水装置,其作用是。 A、抛锚时,用于冲洗锚链 B、抛锚时,用于冲洗锚 C、起锚时,用于冲洗锚和锚链 D、起锚时,用于冲洗锚 4.制链器:锚泊时用以刹紧锚链,将锚链的拉力传递到船体,不使锚机受力,从而保护锚机。航行时用以夹住锚链,防止锚链滑出。常用的制链器有螺旋式、闸刀式和制链钩式三种,如图3-5(a、b、c)所示。 图3-5 制链器 (1).锚设备中制链器的主要作用是。 A、承受锚的负荷 B、承受锚链的负荷 C、保护锚机 D、A+B+C (2).制链器的作用是。 A、夹住锚链防止锚链滑出 B、能承受外力保护锚机 C、使锚链平卧在链轮上 D、A+B+C (3).构造简单、工作可靠但操作不便,仅在中小型船上使用的制链器是。 A、螺旋式制链器 B、闸刀式制链器 C、链式制链器 D、B+C
船舶锚机远程通信系统设计
船舶锚机远程通信系统设计 的介绍 1、申请项目的必要性、目的及意义 浙江海域锚地众多,锚地中船舶锚机操作基本上凭经验人工完成,锚泊系统的自动控制与安全性水平不高,结果使近年来船舶走锚事故以及此引起的撞船、撞桥事故不断增多。 为提高锚机远程通信与控制水平,应用所学专业知识,本项目计划设计制作一套单片机通信系统。使操作人员远程控制收放锚操作。本项目旨在使操作人员从危险的工作环境和艰苦的值锚更作业中解脱出来,提高锚机控制的安全性,对产学研相结合具有积极意义。 2、项目的背景、主要内容、技术水平及应用范围 以上述锚地安全问题为背景,本项目首先研究锚机启动、运行、停车等操作特点,然后设计一套锚机远程控制与通信装置。 根据科技查新,目前该领域仅有的驳船遥控器,其设计方案基于专用集成芯片,价格高,灵活性不强;而且通信距离受限,一般只有几十米,因此推广性受到制约。本项目的核心硬件选用高性价比的单片机芯片,外接通信模块,具有远程通信、易升级、易推广等优点。
本项目先以舟山地区无动力船的锚机控制为对象,设计成功后应用范围可逐步推广到其它地区。 发送器简介 船舶锚机远程通信系统的发送器是船舶锚机远程通信中不可缺少的重要主成部分,通过它控制无线通讯模块可以远程对接收器发送一系列控制信号,进而控制船舶锚机的运行,它的功能就像是一个消息发送器。使用它可以让船舶锚机的控制人员在远程控制锚机的上升和下降,以及上升和下降的速度,使操作人员从危险的工作环境和艰苦的值锚更作业中解脱出来,提高锚机控制的安全性。 该设计的船舶锚机远程通信系统发送器主要具有几部分组成:发送模块,控制模块,以及显示模块。这三大部分的联合使用可以达到人机交互的操作目的,同时使发送器的使用更加直观,更加方便,更加高效。 功能和原理 本部分是基于无线射频通信的船舶锚机远程通信系统。 它的工作过程为:锚机的控制人员按照液晶显示屏上的信息提示,通过按键选择相应的功能,单片机再将相应的功能转化为相应的命令通过无线射频模块发送消息命令来控制锚机的运行。 基本组成 为实现上述功能,本系统的基本组成框图如下图所示:
船舶用锚地计算和船舶阻力计算
一、用锚的计算 锚的系留力:P=W aλa+W cλc L1 P―――系留力。是锚抓力与锚链摩擦力的和(9.81N) W a―――锚在水中的重量。即锚在空气中重量×0.876(Kg) Wc―――锚链每米长在水中的重量(Kg) L1―――锚链卧底部分的长度(m) λ a λc―――锚的抓力系数和锚链的摩擦系数 霍尔锚的λ a λc表 锚的抓重比(海军锚/霍尔锚) 锚的系留力也可用经验公式估算: P=W1H a+WH c L1 W1―――锚重(Kg) H a―――锚的抓重比(见表) W―――锚链每米的重量(Kg/m) H c―――锚链摩擦系数取1.5-1.1 二、锚链出链长度估算 1、正常天气,一般不少于下表
2、在急流区,出链长度不一般不少于表值 3、在风速30m/s(11级)风眩角为300时出链长度值 如链长小于5-6倍水深时,锚的抓力将因锚爪的切泥角小而变小,水面以下的链长的水深倍数与锚爪切泥角见表 三、八字锚与单锚的锚泊系留力的比值:见表 如图:
八字锚的系留力 四、航运船舶 1、锚重的估算: 每个首锚重量一般可用以下公式估算: W=KD2/3 (Kg) K―――系数。霍尔锚取6-8,海军锚取5-7 D―――船舶的排水量(t) 2、锚链尺寸估算: d=KD1/3或d=CW1/2或d=W1/2 d―――锚链直径(mm) K―――系数。可取2.85-3.25 C―――系数。可取0.3-0.37 3、每节锚链重量估算: Q=Kd2(Kg) K―――系数。有档链取0.5375,无档链取0.5625 4、锚链强度估算:
R=Kd2g (N) K―――系数。有档链取56,无档链取38 g―――9.81(m/s2) 5、每节锚链环数估算: M=6250/d M―――每节锚链环数,取整数的单数(个) 五、工程船舶 以海军锚和锚缆计算 1、锚重: 船首边两只,每只锚重量按下式计算: W=K(A+15BT) (Kg) W―――锚重 A―――满载吃水线以上各部分在船中纵剖面上的投影面积(m2) B、T―――分别为船舶宽度与吃水(m) K―――系数。见表 锚重系数K值:
船舶电动三速锚机电气线路图逆向分析法
船舶电动三速锚机电气线路图逆向分析法从锚机实际工作状况,推想“主电路”的结构 船舶锚机是船舶必备的甲板机械,用于船舶安全停泊在水面上。它的实际工作状况就是抛锚、起锚,并且有三速的选择,对锚机电动机方向控制而言就是正反转的控制。由于锚机工作过程中,负载转矩是变化的,则电动机的转速就不能采用单一速度。控制电动机,就是通过控制方向的接触器的主触点和控制速度的接触器的主触点的通断来实现。选择好方向、速度,电动机就可以工作。就电机的速度调节原理,变极调速的方法是:三速电机备有三套“极对数”P1、P2、P3供选择的独立定子绕组,对应电机就有三个速度n1、n2、n3,锚机电动机实际定子绕组有两套独立绕组组成,其中一套绕组由“三角形连接”换接成“双星型连接”,变化前后对应两个速度——低速(三角形)n1、中速(双星型)n2;另一套绕组固定接成“单星型连接”实现高速n3。这样一来控制方向的二只接触器KM1、KM2和控制速度的四只接触器KM3、KM4-1、KM4-2、KM5(KM3对应低速,KM4-2完成把“三角形”转接成“双星行”,KM4-1负责双星行绕组接电源对应中速,KM5对应高速)一共有六只接触器,从电动机机电保护来看,有主保险、热继电器,这样一来“主电路”的构成就非常清楚。 从锚机的“主电路”组成,可推想出“控制电路”组成 电动机的起动、运行、制动停止、正反转、多速度的控制是通过接触器的主触点的通断来实现,而接触器的主触点的动作是受接触器中线圈控制的,线圈有电或无电是受控制元件(按钮或主令开关)、
接触器副触点、各种继电器的触点共同决定的。对于控制电动机单一功能的控制线路,一般用按钮操作,而对于控制电动机多种功能组合的操作,采用主令开关就显得简单、方便、可靠。锚机电路就是采用主令开关,采用主令开关操作的好处:(1)主令开关中的所有开关都是受单一手柄操作带动同轴旋转而一起变化的,操作一次可同时完成方向的确定,速度的选择。(2)主令开关中各个开关的通断随手柄操作是确定的,且对称有规律的,开关自身实现机械自锁,这样可简化电路;开关之间存在着固定的互锁关系,即机械互锁,为电路工作的可靠性提供重要保证,如果再加设常闭电气互锁,就构成了双重互锁,确保工作的准确无误。(3)用主令开关的线路接线比用按钮的接线少,简化了接线,使得线路检查,故障判断也变得容易。要想分析由主令开关操作的控制线路,必须对主令开关有透彻的理解,从结构、符号、开关的通断状况。锚机中主令开关有正转三档、中间零位档、反转三档。主令开关的符号如图2。锚机的控制线路要求,主令手柄必须从“零位档”开始,目的实现零压保护,主令开关中选用SA1连接“零压继电器”线圈来实现。两个方向不能同时选,则选用两个“机械互锁”的开关SA2连接正方向接触器KM1的线圈,SA3连接反方向接触器KM2的线圈,两个方向之间同时采用“电气互锁”。锚机电动机的三个速度也不能同时选,则选SA4连接低速接触器KM3的线圈,SA5连接中速接触器KM4-1和KM4-2的线圈,中、低速之间通过SA4、SA5的“机械互锁”和“电气互锁”来实现。低、高速之间的互锁是通过SA4和SA6的“机械互锁”和“电气互锁”来实现。锚机操作可
船舶交管系统口语
Lesson Twenty-six VTS 船舶交管系统 Dialog A: Enquiry of Traffic Condition 对话1:问讯通航状况 Maritime Queen: VTS station, VTS station. This is M.V Maritime Queen. M.V Maritime Queen. My Call Sign is UBPQ. Spell in Alphabet. Uniform Bravo Papa Quebec. Over. 海后:VTS站台,VTS站台,这是机动船“海后”号、 “海后”号,我的呼号是UBPQ,用字母拼读的 方式为,U-B-P-Q,请讲。 VTS: M.V Maritime Queen. This is VTS Centre. What is your intention? Over. VTS:机动船“海后”号,这是VTS中心,你的目的 是什么?请讲。 Maritime Queen: VTS Centre. Maritime Queen. I am at anchor at fairway buoy No.5. I intended to moor at berth No.2. Is it allowed for me to enter the basin? 海后:VTS中心,这是“海后”号,我在5号航浮处抛 锚,我准备靠2号泊位,我可以进港池吗?VTS: M.V Maritime Queen. M.T Oiler will be outbound at 2100 hours. You have to wait for lock clearance
第三章 锚设备
第三章锚设备 1、圆筒状锚链舱的直径一般是链径的:D A.10 倍 B.20 倍 C.25 倍 D.30 倍 2、有关锚链管,下列说法不正确的是:B A.应设防水盖 B.设在链轮的上方 C.正对锚链舱中央 D.直径约为7~8 倍链径 3、锚链管是锚链进出锚链舱的管道,其直径约为链径的__D____倍。 A.3~4 B.4~5 C.5~6 D.7~8 4、下列有关锚链筒描述不正确的是:A A.是锚链进出的孔道,但不可收藏锚干 B.由甲板链孔、舷边链孔和筒体三部分组成 C.内设冲水装置 D.不能太靠近首尾纵中线 5、在锚设备的组成中,设置在锚链管与锚链筒之间的设备是:C A.弃链器和制链器 B.弃链器和锚机 C.锚机和制链器 D.锚机、弃链器和制链器 6、下面有关锚链舱说法正确的是:D A.锚链舱应设置在防撞舱壁之后部 B.锚链舱应设置在锚机后面 C.锚链舱应设置在首尖舱的下面或前面 D.锚链舱应设置污水井和排水管系 7、锚链管上口设置盖板的目的是:B A.保证人员安全 B.防止海水进入锚链舱 C.防止杂物进入锚链舱 D.确保人员安全,防止海水和杂物进入锚链舱 8、锚机的安装应保证引出锚链的___D___处于同一平面内。 A.链轮和制链器 B.链轮和锚链筒 C.制链器 D.链轮、制链器及锚链筒 9、锚链舱内设置污水井和排水管系的目的是:①、排除积水;②、防止锚链锈蚀;③、冲洗 锚链 A A.①、② B.①、③ C.②、③ D.①、②、③ 10、锚链舱一般设在:①、防撞舱壁之前;②、首尖舱内;③、首尖舱的上面或后面;④、锚机下面A
A.①、③、④ B.①、②、③、④ C.②、③、④ D.①、②、④ 11、制链器的主要作用是:C A.使锚链平卧在链轮上 B.防止锚链下滑 C.固定锚链并将锚和卧底链产生的拉力直接传递至船体 D.为美观而设计 12、制链器的主要作用是:B A.避免锚链跳动 B.减轻锚机负荷,保护锚机 C.减轻锚链下垂曲度 D.便于迅速解脱锚链 13、在末端链节的末端和锚端链节的前端均增设转环的主要目的是:C A.为减轻起锚时的磨损 B.避免抛锚时产生跳动 C.避免锚链发生过分扭绞 D.为增加锚链局部强度 14、锚设备中弃链器的作用是:C A.固定末端锚链 B.使末端锚链不乱 C.保证在紧急情况下能迅速可靠地脱开锚链 D.便于锚链拆修 15、螺旋式弃链器的操作手轮设在锚链舱___B___到达的地方,并能由其迅速______锚链。 A.内部不易,系固 B.外部易于,解脱 C.内部易于,解脱 D.外部易于,系固 16、弃链器的作用是:D A.使末端锚链固定于船体 B.便于脱解锚链进行保养 C.在紧急情况下自动解脱 D.在紧急情况下由人工迅速解脱 17、横闩式弃链器的特点是:①、结构简单,使用方便;②、一般装设于甲板上;③、锚链绷紧时容易松脱A A.①、② B.①、③ C.②、③ D.①、②、③ 18、螺旋式弃链器的特点是:①、结构较复杂;②、使用安全可靠;③、一般装设于锚链舱舱壁上D A.①、② B.①、③ C.②、③ D.①、②、③ 19、螺旋式制链器的特点是:①、动作缓慢,操作方便;②、工作可靠;③、结构简单,操作迅速A
电子海图在船舶锚泊
在船舶锚泊(抛锚,起锚,锚泊值班,确定锚点及锚位)中的应用 电子海图在锚泊中作用可以分为四个方面:抛锚,起锚,锚泊值班及锚点(即锚位)推算方法。 普通方法锚泊: 过去没有电子海图和gps定位,往往靠物标来定位,确定方位或距离到指定的位置锚泊,要准确抛到指定位置,经验和熟练程度起决定性作用。 现在比较方便,没有电子海图,可以把锚点标绘在gps或雷达上,很容易确定到达锚点的方向和距离,普通小船,雷达距离圈放在0.06-0.07左右,当距离圈和船艏线交点与预定的锚点重合时,这里忽略船的宽度,如果雷达上有矢量显示,就不必忽略宽度了,此时可以考虑锚链孔与预定的锚点位置重合时,就可以抛锚了,这就是我们的指定位置抛锚。 一.抛锚时使用电子海图 用电子海图,可以把指定锚点当成航路输入,做个临时航路,船舶用矢量方式显示在海图上,当船头(锚链孔)位置到达指定锚点时,就可以抛锚了,此时可以用有人落水或时间按钮,记录船舶位置和航向,推算出准确的锚点,可能与指定锚点有点区别,如果不是指定锚点,推算出的锚点(本船船位,加上定位点至锚链孔距离与方向),就是锚位。 二.锚泊期间及值班作用,如何判断是否走锚及设定值班警报及锚链受力情况判断依据 也可以根据矢量,直接在锚泊时,在锚链孔的位置,在海图上做个标志,这个点就是锚位,之后根据锚链长度及本船定位点到锚链孔位置之和为半径,以锚点为圆心,做出锚泊值班警报圆来判断是否走锚。船位不在锚泊值班警报园内,就可以判断船舶走锚了。 在锚泊过程中,根据锚点,可以判断锚链受力情况及方向,及锚是否抓牢等,船位在预定圆半径一半多一些的时候,如果锚链受力,锚基本就抓牢了。 如果在锚泊时,没有及时定锚位,可以根据锚泊期间,船舶航迹(锚泊时间长,一般会是一个圆形轨迹,大约锚位就在圆心附近了),特别是船舶锚泊风或流比较大时,此时,可以根据受力方向及锚链长度本船船位及定位位置到锚链孔位置,画出大约的锚位,和传统定位推算锚位一样,可以用此种方法反过来判断当初定的锚位是否正确,是否走锚等。 三.起锚时,判断锚链受力及锚链方向的依据 驾驶台可以根据锚位,判断的锚链受力与方向与大副核对是否一致,可作为用车和舵的依据,非常实用方便。 锚点是否准确,和锚泊时速度与大副报告抛锚时间及驾驶台记录的船位是否一致有直接关系。 对于起锚时,标记的锚位如果准确,比大副在前面告诉锚链方向要准确些,大副报告的锚链方向,仅仅是看到方向,未必是锚链真实方向,特别是锚链不吃力垂直状态,此时锚链也可能过船底在抛的锚的反方向的哪个范围,眼见未必是真实结果,而通过电子海图标注的锚点来判断,就比较直观准确,比陆标定位要准确,当然,如果抛锚后,走锚或剩下一点点锚链,锚位可能有所变动,此时判断可能有误差或不准确。四.锚点确定方法 锚点确定对于上述操作是非常关键,锚点实际上是推算出来的,是通过锚泊时船位,加上定位时,定位的位置与锚链孔位置长度与方向推算出来的,所以锚泊时记载时,要记载抛锚时的船位和船艏向,很多驾驶员在记载时就是错误,记载锚位,错把船位当锚位。 以香港抛锚,锚泊期间及起锚为例加以说明上述几个论点 引水操作,实际船舶轨迹来说明,香港海事处指定香港西锚地2号锚位是,22-18.24N、114-04.73E,首先在海图上标注此点,可以做个临时航路,以此点为终点。电子海图上船舶以矢量方式显示,调整航向及速度,使船舶锚链空位置与指定锚点位置重合时,船舶有一定退速,最为理想,此时抛锚,如果根据其他船的锚泊时方向,调整与其他船方向一致进入锚点来锚泊是非常理想状态,如果不能也无所谓,这里就不讲锚泊的操作方法了。 左锚七节,实际锚泊时船位:22-18.2292N、114-04.7469E(此点可以通过电子海图上的人员落水或事件按钮在抛锚时,按下,比较准确,同时时间也有记录),船舶有进速,航向320,根据这个数据及定位点与
探讨船舶锚机制动器故障及处理
探讨船舶锚机制动器故障及处理 摘要:锚机是船舶系统中较为重要的航行设备,他的好坏直接影响到船舶航行的安全性。如果锚机的制动器出现错误,会导致船舶无法正常运行,甚至会增加船舶的安全隐患。因此需要工作人员了解船舶锚机制动器故障的原因,根据实际情况制定切实可行处理方式。 关键词:船舶;锚机制动器;处理措施;故障原因 船舶在航行过程中,依靠在螺旋桨进行倒转和减速,是指引船舶航行方向的重要依据。漂泊的船舶需要依靠抛锚定位,如果船舶上的锚机出现故障,则不能正常进行抛锚,或者抛锚后无法顺利起锚,导致船舶方向模糊,船员将受到危险。一般的船头都会有锚机,将其作为绞缆机,船舶靠岸后,需要进行拖带作业,在起锚时需要利用安全设备,保证操作程序的有序性。如果船舶出现锚机故常,则不能出航,需要及时丢弃锚链及锚,减少经济损失。 1.锚机制动器故障原因 当前船舶使用电动三速锚机,在规定的功率和体积的条件下,需要通过手柄操作,切换电机内部的接线,使抛锚、起锚各占一档,达到提升起锚速度的目的。由于控制要点趋于多样性,需要掌握锚机的控制点。以下将对锚机制动器的故障进行分析。 1.1电机内部接线设置 一般船舶在遇到较大或者突然的风浪时会导致船舶锚机制动器出现故常,如果船舶出现冒烟的情况,需要立即停止自动开关。首先需要向技术人员汇报锚机的使用情况及出现故障的原因和条件,工作人员要了解的锚机的工作情况,包括以下几点:在出现故障之前没有出现异常的情况,电机转动正常,操作次数不多,工作时间正常。其次需要对故障进行详细的检查,重新检查电机的直流制动器,了解接线情况[1]。电机内部接线设置如图一: 1.2温度因素 如果甲板上的温度过高,超过45℃,但是实际锚机的工作时间在15min左右,会致使锚机制动器受到温度因素的影响,导致制动器出现故常。 1.3海水影响 海水本身属于盐水,自身的腐蚀性和导电性较强,如果船舶出现故障,导致海水侵入到船舶内部,和重要的开关或者阀门接触,会严重破坏绝缘处的性能,线路受到损害,进而致使线圈被烧坏。需要工作人员及时对船舶内部进行查看,尝试制动器内积水有无咸味,可以判断海水是否进入到船内。由于积水是平时空
内河工程船舶工作锚质量计算指南
指导性文件 GUIDANCE NOTES GD 03—2005 中国船级社 内河工程船舶工作锚质量计算指南GUIDELINES FOR ANCHOR MASS CALCULATION OF INLAND WATERWAYS WORKING SHIP 2005
指导性文件 GUIDANCE NOTES GD 03—2005 中国船级社 内河工程船舶工作锚质量计算指南GUIDELINES FOR ANCHOR MASS CALCULATION OF INLAND WATERWAYS WORKING SHIP 2005 北 京 BeiJing
目录 第1章 通 则 (1) 1.1 一般规定 (1) 1.2 定义 (1) 第2章绞吸式挖泥船和斗轮式挖泥船工作锚质量 (2) 2.1 一般规定 (2) 2.2 锚质量 (2) 第3章链斗挖泥船工作锚质量 (4) 3.1 首主锚质量 (4) 3.2 边锚和尾锚质量 (4) 第4章抓斗挖泥船、起重船和打桩船工作锚质量 (7) 4.1 首边锚质量 (7) 4.2 尾锚和首主锚质量 (7)
第1章 通则 1.1 一般规定 1.1.1 本指南适用于本社《钢质内河船舶入级与建造规范》(以下简称“规范”)规定的绞吸挖泥船、斗轮式挖泥船、链斗挖泥船、抓斗挖泥船、起重船和打桩船工作锚质量计算。 1.1.2 本指南旨在向船舶设计、建造、航运和船检部门提供内河工程船舶工作锚质量计算方法,为实施本社“规范”有关规定提供参考标准。 1.2 定义 1.2.1 本指南采用的单位制为: 质量:公斤(kg) 长度:米(m) 力:牛顿(N) 1.2.2 符号规定: 船长L、船宽B、型深D、吃水d等与“规范”中第2篇相应章节的规定相同。
船舶货运计算题
练习题 第二章: 例: Q 轮1月20日由上海开往坦桑尼亚的达累斯萨拉姆,该轮在上海港及在达累斯萨拉姆港吃水不受限制,燃料及淡水均在上海港装足,共装重柴油1141吨,轻柴油200吨,滑油52吨,淡水324吨,返航时使用的燃油和淡水可在达累斯萨拉姆港补给。该轮在达累斯萨拉姆港装卸货后,装运铜锭、转口棉花、沥青及亚麻,由该港返回上海港。该轮在达累斯萨拉姆港装卸货共停泊约半个月时间,船舶航速为17.5节,上海港至达累斯萨拉姆港的航程为6218海里,空船重量为5565吨,船舶常数为220吨。 求该轮往返两个航海次的净载重量 一、上海—达累斯萨拉姆 (1)确定总载重量 根据《载重线海图》,知上海至香港一段海区,1月20日属夏季季节期,而香港至达累斯萨拉姆港一段海区,1月20日后属热带季节期。 本航次船舶是由使用夏季载重线的海区航行至使用热带载重线的海区,因此本航次的总载重量可根据夏季载重线的吃水在载重标尺中查得: DW=14145吨。 (2)计算整个航次的总储备量 计算航次的净载重量 二、达累斯萨拉姆—上海 (1)确定总载重量 ① 计算使用高载重线航段内的储备品消耗量 吨12180220174514145=--=--=∑ C J DW NDW 吨 6044724 5.175395 =??= ?= ∑s AB AB g S J ν
② 计算热带及夏季满载排水量的差值 ③ 比较两者数值,确定船舶允许排水量或总载重量。 (2)计算航次储备量 (3)计算航次净载重量 作业题: 某轮执行A —D 的航次任务,其航行海区段使用的载重线如下图所示。已知该船热带排水量为20205吨,夏季排水量为19710吨冬季水量19215吨,空船排水量5565吨,粮食、船员与行李设备及备品等重为28吨,船舶常数C=220吨,船舶航行速度为17.5节,航行储备时间为5天,航行每天的燃料及淡水消耗为45吨/天,到达目的港D 后需停泊2天,才可补给燃料及淡水消耗量为15吨/天。 试确定该轮航次净载重量 例: 1、某轮净载重量为8000吨,货舱容积为12000M 3,现装生铁(积载因数为0.5M 3/吨)和皮革(积载因数为3.0M 3/吨)。问两种货物各装多少才能达到满舱满载的要求? 吨 4951971020205=-=?-?=?-S T S T δ吨 即14640556520205495604=-=?-?=>?>-∑ L T S T AB DW ,J δ吨 13376220104414640=--=--=∑C J DW NDW
走锚分析
楼主发表于: 02-02 倒序阅读┊全看┊小中大 浅析船舶走锚后的漂移速度 浅析船舶走锚后的漂移速度 2010年2月1日 摘要:由于港口泊位数的不足,致使船舶抛锚等待的几率增加,加上时间延长,气象变化,致使走锚几率增加。走锚事故后对船舶运动的掌握和控制就显得越来越重要。文章在分析走锚原因及走锚后船舶运动情况的基础上提出了一个近似求取走锚船漂移稳定速度的数学模型,并据此模型进行了特定船型的计算,列出计算结果,以期能对实践有所指导。 关键词:走锚锚泊力风压力水动压力模型构建 前言 船舶在进行检疫、等泊位、候潮、锚地过驳或避风时,都要在港内或港外的锚地抛锚。在特殊情况下,船舶也可能根据需要在一个较为生疏的水域锚泊。随着国际贸易的发展,来往于各大洲之间的船舶开始向自动化,大型化发展,船舶数量不断增加,这不但使世界港口的交通流密度增大,也增加了各港口锚地的负担,使单位面积中的锚泊船增多,其中不乏危险品船、大吨位的油船和化学品船,而船舶在锚泊后由于受到风浪流等外力的作用,可能发生走锚、碰撞和搁浅事故。这其中最常见且后果最严重的当数走锚事故了。发生走锚后如果不能及时采取正确有效的控制措施,失控的走锚船将危及他船或水工建筑的安全,如果发生触碰后果往往不堪设想。本文在锚泊船受力分析的基础上,利用物理原理中的力矩平衡的原理对走锚后船舶的运动的稳定速度及达到这一稳定速度的时间进行了数学模型的构建及探讨,并对特定船型进行了计算,对走锚船在特定时间内的运动范围进行了界定。 1锚泊船的受力分析 船舶在有风流情况下锚泊时,同时受到锚泊力,风压力,流压力及波浪的冲击压力等影响,下面分别进行
描述。 1.1锚泊力 锚泊力有两部分组成,即锚的抓力和锚链的摩擦力,因此锚在海底的系留力决定于锚的重量、形状以及锚链长度、重量、底质,其大小可由下式求得: Pr=Wa×λa+Wa×λa×L 式中:Pr—锚泊力;Wa—锚重;λa—锚抓力系数;Wc—链重;λc—链摩擦系数;L—锚链卧底部分长度。 锚泊力作用点在抛锚一舷船首锚链筒处,在锚泊船受风或流作用时该力沿锚链悬重线的切线指向上风或来流方向。 1.2风动压力 锚泊船所受风动压力是指船体水线以上部分所受的空气压力。风动压力是引起船舶偏荡和走锚的首要因素。 风压力的大小与风速风舷角受风面积和形状有关,其值用下式计算: Fa=1/2[ρa×Ca×Va2×(Aa×Cos2θ×+Ba×Sina2θ)] 式中:ρa—空气密度(1.226kg/m3);Ca—风动 压力系数;Va—相对风速;θ—风舷角;Aa—水线上船体正面投影面积;Ba—水线上船体侧面投影面积;Fa—风动压力。 风动压力作用中心位置A点至船首的距离a,受风舷角θ,船舶上层建筑形状以及面积分布情况所影响,a 的值可用岩井经验公式估算:
锚设备
锚设备 (一)锚链的种类、组成与标记 ●锚链的种类、特点与组成 1.锚链的种类 (1)按制造方法分有铸钢锚链、焊接锚链和锻造锚链三种。 ①铸钢锚链 ②焊接锚链 ③锻造锚链 (2)按链环结构分为无档链和有档链两种。 在相同尺寸下,有档链的强度大,变形小,堆放时不易绞缠,在商船上广泛采用。无档链尺寸小,只用于小锚上。 (3)按钢材级别分AM 1、AM 2 、AM 3 三级。 2.锚链的组成 一根完整的锚链由若干节锚链通过连接链环或连接卸扣连接而成,每节锚链由许多链环组成。 (1)链环 锚链链环按其作用和位置分为普通链环、加大链环、转环、链端卸扣、链端链环、末端链环和连接链环等。 链环的大小以链环的截面直径表示,有档普通链环的直径为d,有档普通链环的长度应是链环截面直径d的6倍,宽度应是d的3.6倍;加大链环的长为6.6d,宽为4d;散合式连接链环的长为8d,宽为4d,双半式连接链环长度为6d,宽为4.2d。衡量锚链强度的标准链环是普通链环。普通链环的直径是衡量锚链强度的标准。 (2)链节 锚链的长度以“节”为单位,我国规定每节锚链的标准长度为27.5m,且每节锚链的链环数应为奇数。每根锚链由锚端链节、末端间链节和末端链节组成。 锚端链节是锚链的第一节,与锚相连。该链节中的末端卸扣和锚卸扣的横销应朝向锚,即圆弧部分朝向中间链节。转环的环栓应朝向中间链节,以减少摩擦和卡阻。设置转环的目的是防止锚链过分扭绞。 末端链节是锚链的最后一节,与弃链器相连。其转环的环栓也应朝向中间链节。 中间链节如用连接卸扣连接,则连接卸扣的圆弧部分应朝向锚,以避免抛起锚时其通过持链轮时产生跳动,冲击和卡阻。 链节之间多以连接链环或连接卸扣连接。如用连接链环连接各节锚链,则连接链环的两端为普通链环,。如用连接卸扣连接各节锚链,则连接卸扣两端均依次连接末端链环、加大链环然后再连接普通链环以保证强度和尺寸平顺过渡。 ●锚链的标记 在抛起锚时,为能迅速识别锚链松出的长度,在起锚时能掌握锚链在水中的节数,在各连接链环及其附近的有档链环上作出标记。 锚链标记方法是:在第一与第二节之间的连接链环(或卸扣)前后第一个有档链环的撑挡上绕金属丝域白钢环),并在两链环之间的有档链环上涂白漆,连接链环涂红漆,以此表示第一节。在第二节与第三节之间的连接链环前后第二个有档链环撑挡上绕金属丝(或白钢环),并在该两链环之间的所有有档链环上涂
船舶用锚的计算和船舶阻力计算
一、用锚的计算 锚的系留力:P=W a λ a +W c λ c L 1 P―――系留力。是锚抓力与锚链摩擦力的和(9.81N) W a ―――锚在水中的重量。即锚在空气中重量×0.876(Kg) Wc―――锚链每米长在水中的重量(Kg) L 1 ―――锚链卧底部分的长度(m) λ a λ c ―――锚的抓力系数和锚链的摩擦系数 霍尔锚的λ a λ c 表 锚的抓重比(海军锚/霍尔锚) 锚的系留力也可用经验公式估算: P=W 1H a +WH c L 1 W 1 ―――锚重(Kg) H a ―――锚的抓重比(见表) W―――锚链每米的重量(Kg/m) H c ―――锚链摩擦系数取1.5-1.1 二、锚链出链长度估算 1、正常天气,一般不少于下表
2、在急流区,出链长度不一般不少于表值 3、在风速30m/s(11级)风眩角为300时出链长度值 如链长小于5-6倍水深时,锚的抓力将因锚爪的切泥角小而变小,水面以下的链长的水深倍数与锚爪切泥角见表 三、八字锚与单锚的锚泊系留力的比值:见表 如图: 四、航运船舶 1、锚重的估算: 每个首锚重量一般可用以下公式估算: W=KD2/3(Kg)
K―――系数。霍尔锚取6-8,海军锚取5-7 D―――船舶的排水量(t) 2、锚链尺寸估算: d=KD1/3或d=CW1/2或d=W1/2 d―――锚链直径(mm) K―――系数。可取2.85-3.25 C―――系数。可取0.3-0.37 3、每节锚链重量估算: Q=Kd2(Kg) K―――系数。有档链取0.5375,无档链取0.5625 4、锚链强度估算: R=Kd2g(N) K―――系数。有档链取56,无档链取38 g―――9.81(m/s2) 5、每节锚链环数估算: M=6250/d M―――每节锚链环数,取整数的单数(个) 五、工程船舶 以海军锚和锚缆计算 1、锚重: 船首边两只,每只锚重量按下式计算: W=K(A+15BT)(Kg) W―――锚重 A―――满载吃水线以上各部分在船中纵剖面上的投影面积(m2)
船舶的主要设备
船舶的主要设备 一艘营运的船舶必须安装有各种各样的设备。通过这些设备的应用来完成船舶的航行、靠离泊、装卸货物等生产作业,并保证船舶和人员的安全。船舶的主要设备有动力设备、操纵设备、装卸设备和安全设备等。 船舶动力设备 船舶必须配置一整套符合规范要求的动力装置和辅助设备后,才能在水上航行。这些动力装置包括有船舶主动力装置、辅助动力装置、蒸汽锅炉、制冷和空调装置、压缩空气装置、船用泵和管路系统、造水装置和自动化系统等。这此机电动力设备主要集中于机舱,专门管理这些设备的技术部门是轮机部。 1、主动力装置 船舶主动力装置又称“主机”,它是船舶的心脏,是船舶动力设备中最重要的部分,主要包括: (1)船舶主机 能够产生船舶推进动力的发动机的一种俗称,包括为主机服务的各种泵和换热器、管系等。目前商船的主机是以船舶柴油机为主,其次是汽轮机。 (2)传动装置 把主机的功率传递给推进器的设备,除了传递动力,同时还可起减速、减震作用,小船还可利用传动设备来改换推进器的旋转方向。传动设备因主机型式不同而略有差异,总的来说由减速器、离合器、偶合器、联轴器、推力轴承和船舶轴等组成。 (3)轴系和推进器 船舶推进器中以螺旋桨应用最为广泛,大多采用固定螺距或可调螺距的螺旋桨推进器;船舶轴系是将主机发出的功率传递给螺旋桨的装置。船舶主机通过传动装置和轴系带动螺旋桨旋转产生推力,克服船体阻力使船舶前进或后退。 2、辅助动力装置 船舶辅助动力装置又称“辅机”,是指船上的发电机,它为船舶在正常情况和应急情况提供电能。由发动机组、配电盘等机电设备构成了船舶电站。 (1)发电机组 原动力主要是由柴油机提供,基于船舶安全可靠和维护管理简便的考虑,大型的船舶配置有不少于两台同一型号的柴油发电机,根据需要可多部同时发电。 为了节能,航行中,有的船舶可利用主机的传动轴来带动发电机发电(轴带发电机)或利用主排出气的余热产生低压蒸汽来推动汽轮发电机组发电等。 (2)配电盘 它进行电的分配、控制、输送、变压、变流以保证各电力拖动设备及全船生活、照明、信号及通讯等的需要。 3、蒸汽锅炉 以柴油机为主机的船上,都需要设有蒸汽锅炉,它由辅助燃油炉和废气锅炉以及为其配套服务的管系、设备所组成。辅助燃油锅炉是供应船上上些辅助性蒸汽的需要,如加热燃油和滑油、暖气、生活用水、厨房、开水等,并满足一些辅机用蒸汽的需要。为节能,航行中废气锅炉利用柴油机排气中的余热来产生蒸汽,在停泊时只使用辅助燃油锅炉。 4、制冷和空调装置 船舶安装制冷装置的是冷藏运输货物、冷藏一定数量的食品以及改善船员和旅客的生活工作条件等。空气调节装置的任务在于保持舱室中具有适于人们工作和生活的气候条件,它包括夏季降温、除湿,冬季加热、加湿以及一年四季的通风换气工作。其主要设备有制冷压缩机、蒸发器、冷凝器、空调器及其自动化控制元件等。 5、压缩空气装置